Planar parallel mechanism control device driven through double five-bar mechanisms and planar parallel mechanism control method
A five-bar mechanism and control device technology, which is applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems affecting the performance of parallel mechanisms, existence of singular configurations, and small working space, so as to achieve good driving and control effects and eliminate Effects, motion smoothing effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
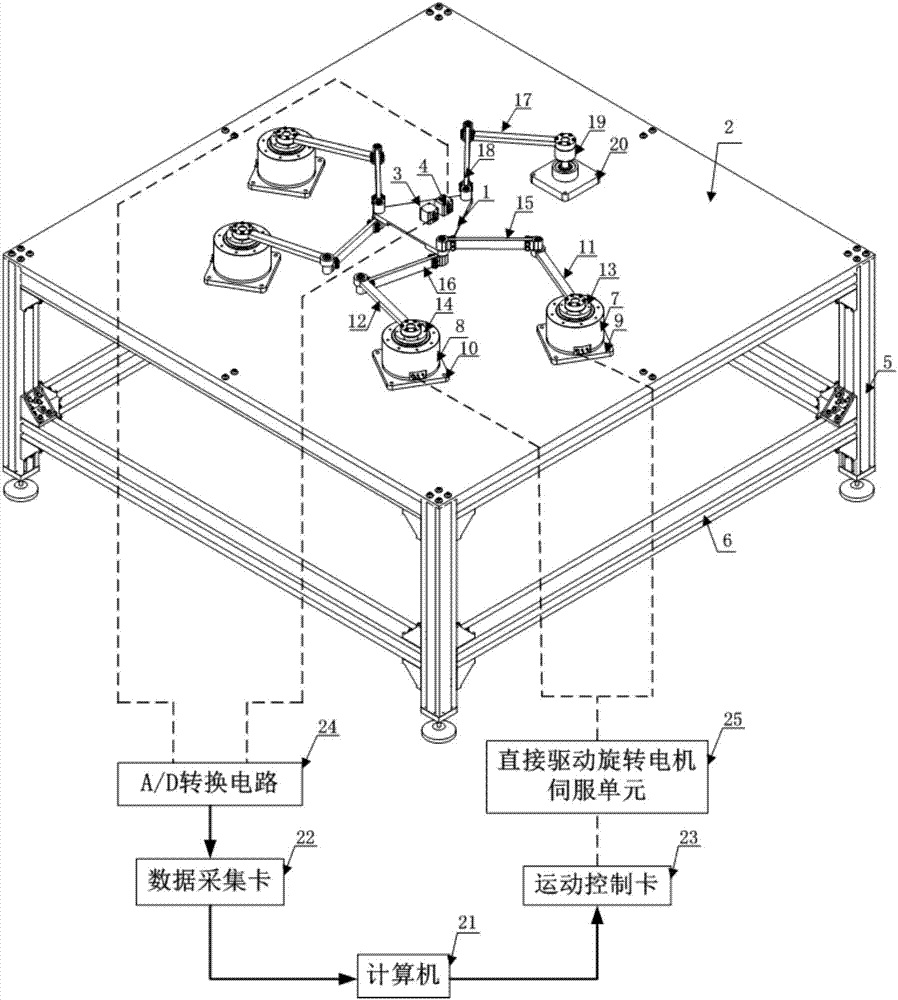
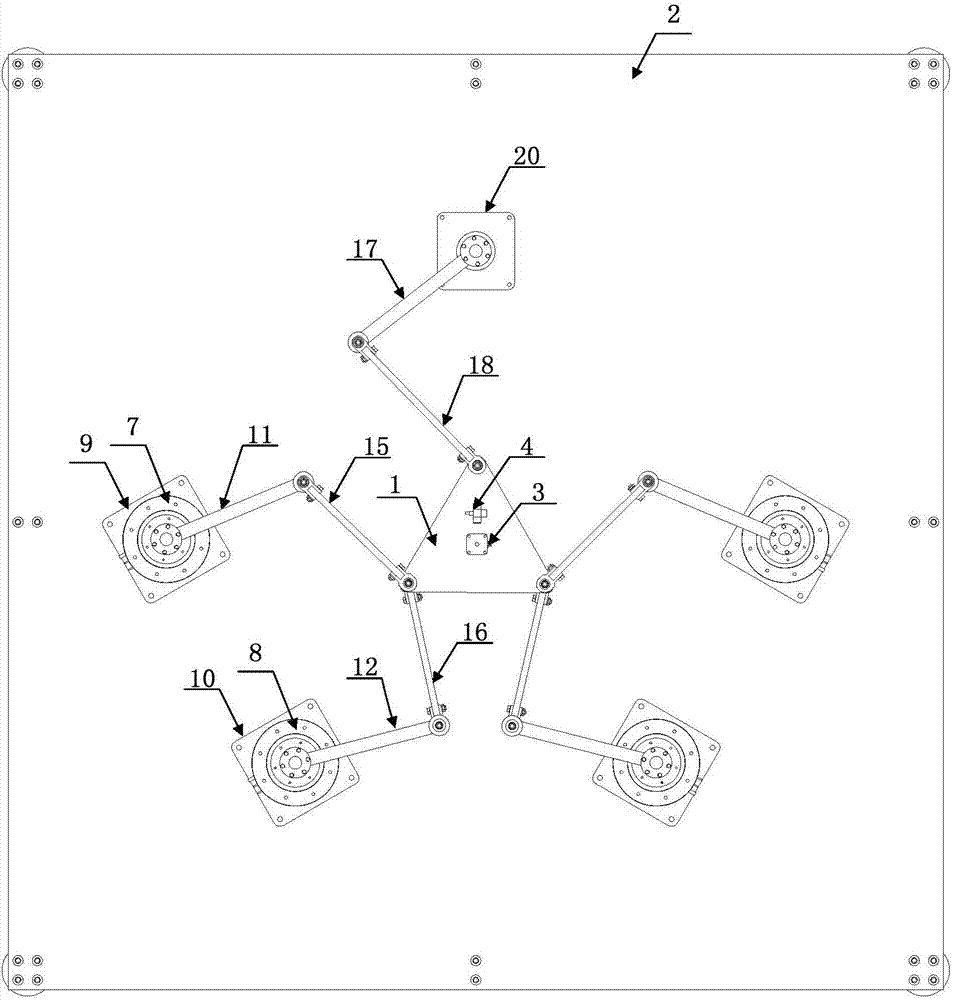
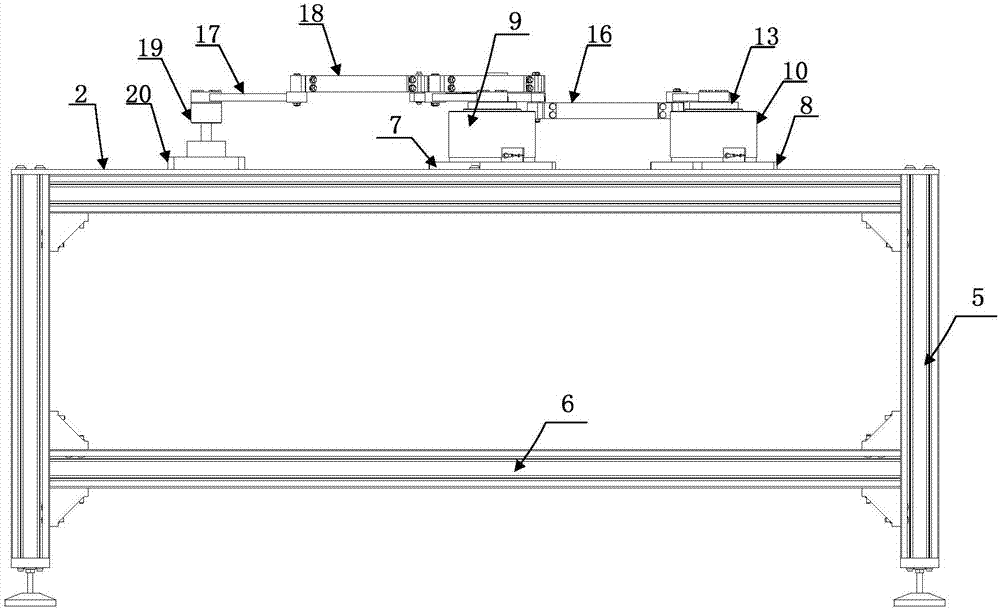
[0051] Such as Figure 1 ~ Figure 3 As shown, this embodiment provides a planar parallel mechanism control device driven by a double five-bar mechanism. The device includes a planar parallel mechanism body and a control unit. The planar parallel mechanism body includes a moving platform 1, a static platform 2, a passive movement branched chain and two planar five-bar linkages, figure 1 The dotted line connection in shows the connection diagram of the electric signal and the body of the planar parallel mechanism, and the direction arrow shows the transmission direction of the detection and control signal flow;
[0052] Such as Figure 1 ~ Figure 4 As shown, the moving platform 1 is a triangular flat plate. In this embodiment, an equilateral triangular flat plate is preferably used. There are three holes at the three corners. The rod mechanism is connected, the first three-axis acceleration sensor 3 and the second three-axis acceleration sensor 4 are installed on the moving pl...
Embodiment 2
[0072] The main features of this embodiment are: the second triaxial acceleration sensor 4 is installed at a distance of 30 mm or 50 mm from the center of the moving platform 1 . All the other are with embodiment 1.
[0073] In summary, on the basis of the plane 3-RRR (rotation-rotation-rotation branch) parallel mechanism, the present invention introduces new branch chains into two of the parallel branch chains respectively to form a planar five-bar mechanism as an active motion branch chain, and the third parallel branch chain is used as a passive motion branch chain. Due to the structural characteristics of the planar five-bar mechanism, their driving force on the moving platform will not be parallel to the line connecting the two compound hinge points at the same time, so the planar parallel connection can be eliminated. The singularity problem of the mechanism; the active rod of the planar five-bar mechanism is driven by a direct drive rotary motor without a reducer, which...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More