

Wheel-leg hexapod robot with suspension system
A hexapod robot and suspension system technology, applied in the field of wheel-legged hexapod robots, can solve problems such as less research, and achieve the effects of improving carrying capacity, reducing weight, and improving operating efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be described in further detail below in conjunction with the accompanying drawings.
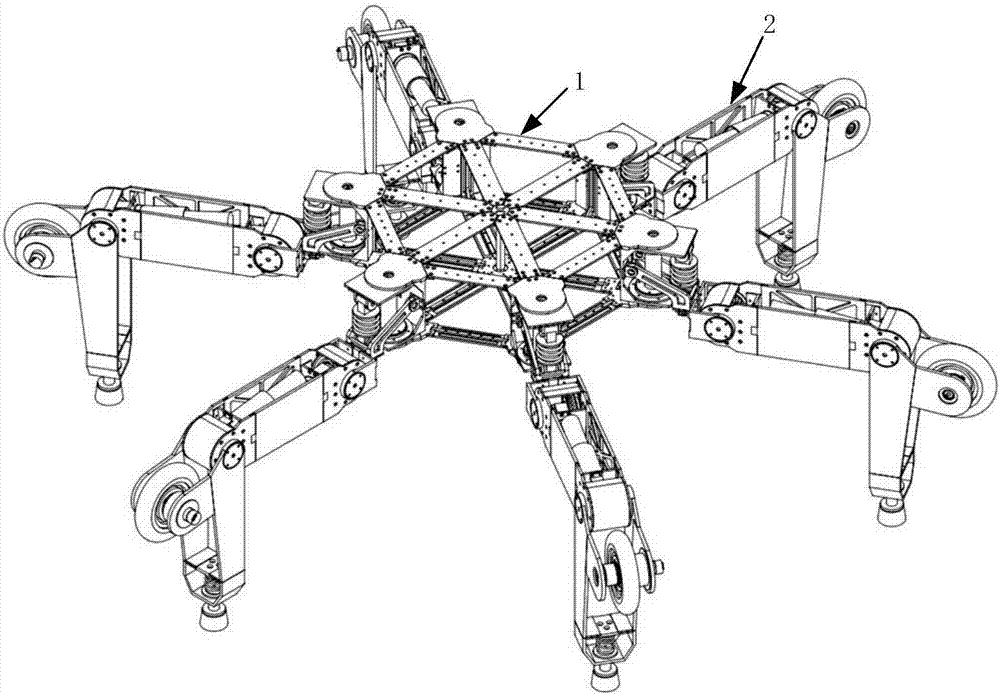
[0037] The present invention has the wheel-leg type hexapod robot of suspension system, as figure 1 As shown, it includes a body 1 and six single-leg structures 2 . Among them, the body 1 is a double-layer regular hexahedron frame structure composed of upper and lower hexagonal plates, each corner of the body 1 is used as a single-leg structure installation position, and is used to install the single-leg structure 2, and the body 1 is evenly installed in the circumferential direction. There are six single-leg structures 2, and through the coordinated movement of the six single-leg structures 2, the omnidirectional walking and wheeled movement of the wheel-legged hexapod robot of the present invention can be realized.
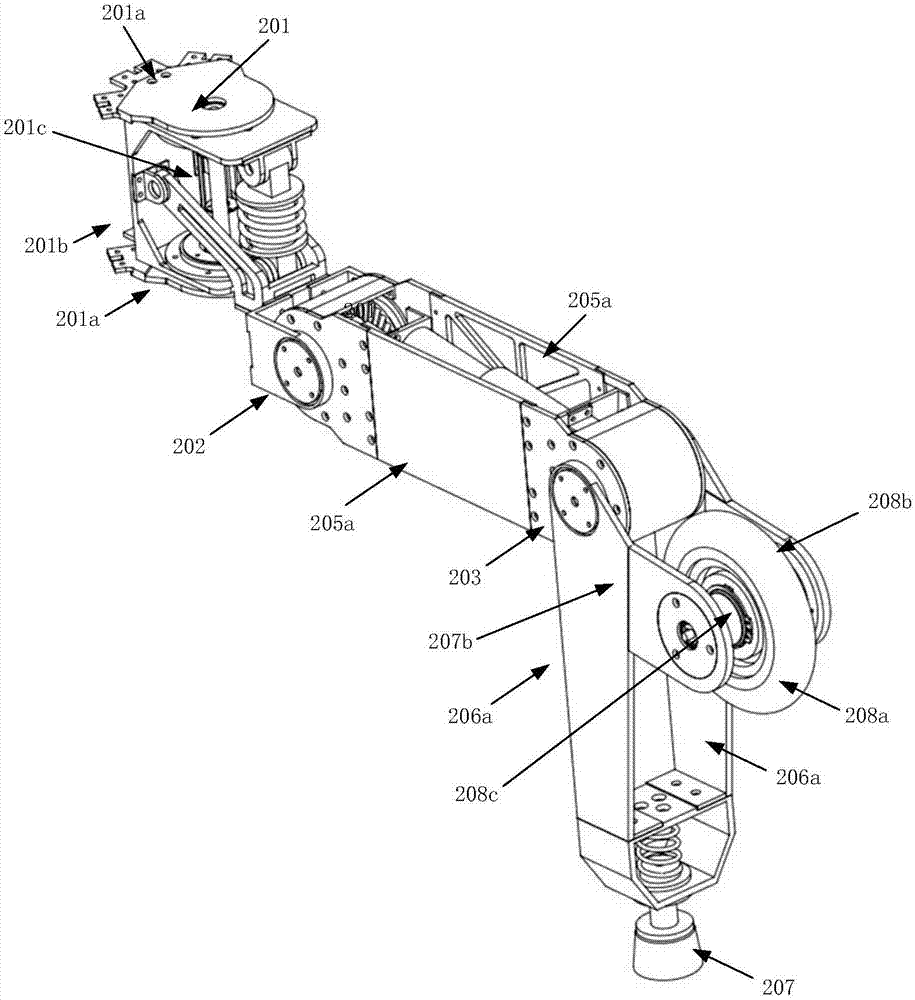
[0038] The above-mentioned single-leg structure 2 has three traditional joints, namely the heel joint 201, the hip joint 202 and the knee joi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More