

Camera external parameter calibration method of multi-camera system
A calibration method and multi-camera technology, applied in the field of computer vision, can solve problems such as complex calibration process, and achieve the effects of high calibration accuracy, simple production and high calibration efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0024] In the camera extrinsic parameter calibration method of the multi-camera system, the existing method of using a ball as the calibration object rarely involves the calibration of the multi-camera extrinsic parameters, while the early method needs to use an accurate three-dimensional calibration object. The disadvantage is that precise calibration objects need to be used, and the calibration cost is relatively high; in the calibration method using planes as calibration objects, since the plane cannot be visible to multiple cameras in all directions at the same time, it is necessary to first obtain the coordinates of each camera relative to different world coordinate systems. External parameters, and then transform the external parameters relative to different world coordinate systems into external parameters relative to the same world coordinate system. The calculation process is complicated and has cumulative errors.
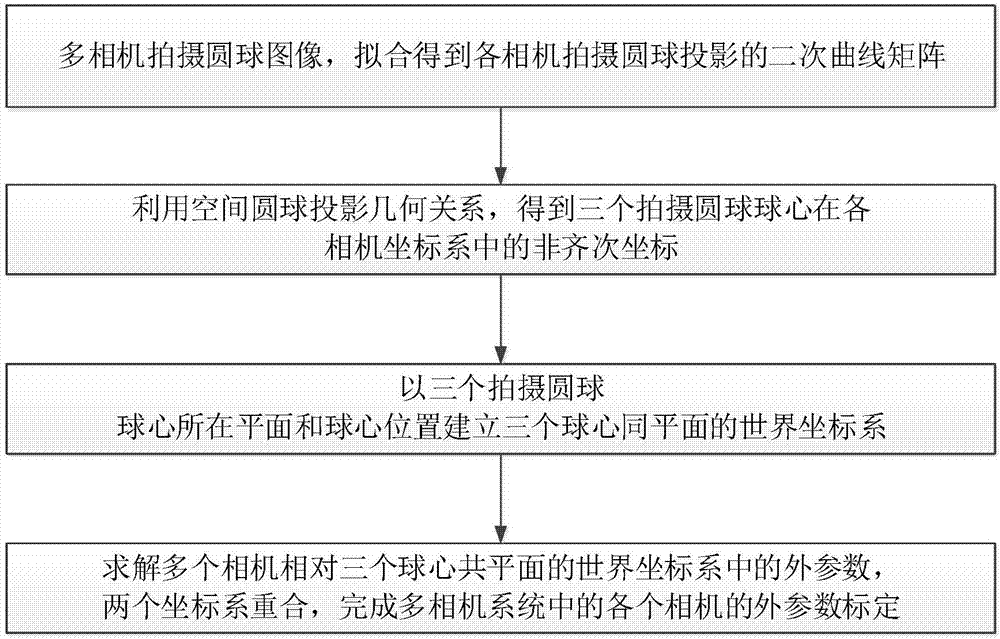
[0025] For this reason, the present invention propose...
Embodiment 2
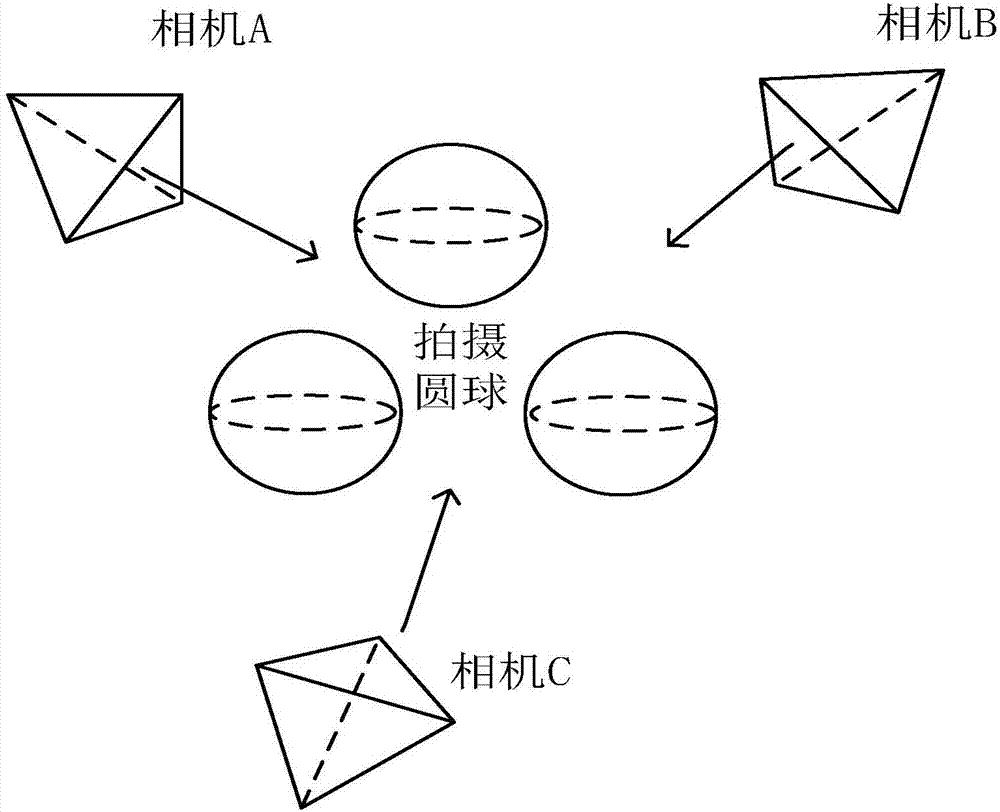
[0035] The camera extrinsic parameter calibration method of the multi-camera system is the same as in embodiment 1, wherein, in step (1), the quadratic curve matrix of the spherical projection taken by each camera in the multi-camera system is obtained by fitting, including:
[0036] Assuming that there are M cameras in the multi-camera system, each camera in the multi-camera system shoots three spherical images with different spatial positions and known radii from different angles of view, see figure 2 , where on the image plane corresponding to the i-th camera, the edges of the three shot spherical projections are obtained, and the sub-pixel edge extraction algorithm is used to extract the edge points of the three shot spherical projections, and the i-th shot is obtained through the quadratic curve fitting algorithm The conic matrices of three spherical projections captured by a camera are denoted as For other cameras in the multi-camera system, the quadratic curve method ...
Embodiment 3
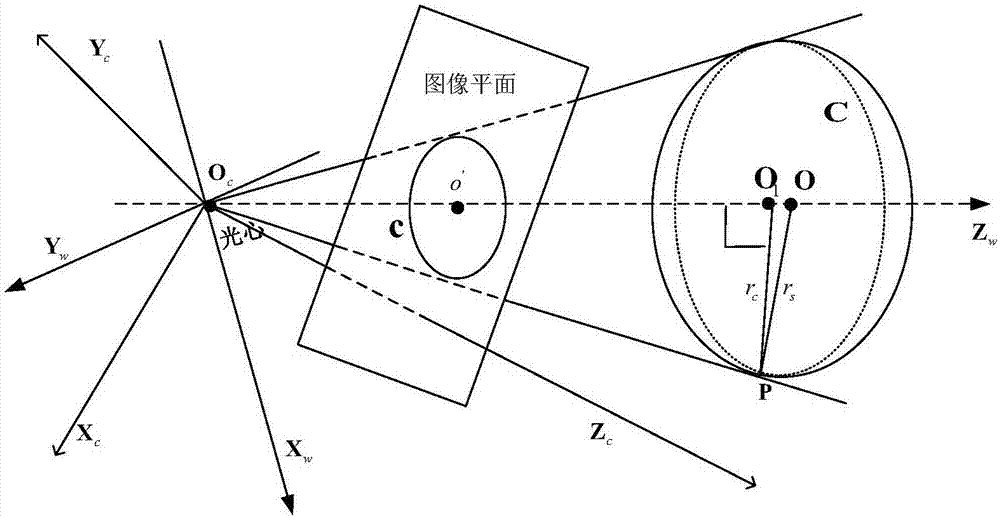
[0041] The camera extrinsic parameter calibration method of the multi-camera system is the same as embodiment 1-2, the specific steps of the non-homogeneous coordinates of the center of the three shooting spheres in the camera coordinate system of each camera in the multi-camera system described in step (2) Including:
[0042] 2.1 Clarify the relationship between the spatial spherical projection and the internal parameters of the camera: see image 3 , using the plane homography, the relationship between the conic curve of the shooting spherical projection and the internal parameters of the camera, the relationship between the camera coordinate system and the world coordinate system, the origin of the camera coordinate system is the camera optical center O c , let the origin of the world coordinate system be O w , the world coordinate system is in O w -X w Y w Z w Indicates that O w Z w Axis, the center of the sphere projected through the space that forms the camera ima...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More