

An Extrinsic Calibration Method for Multiple Time-of-Flight Depth Camera Systems
A depth camera and time-of-flight technology, applied in image analysis, instrumentation, calculation, etc., can solve the problems of insufficient robustness and low precision, and achieve the effects of easy implementation, simple calibration process, and reasonable method design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] For better understanding, the present invention will be further explained in more detail in the following description of the embodiments with reference to the accompanying drawings.
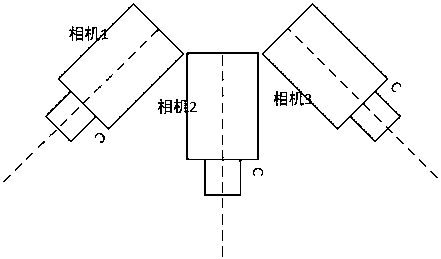
[0029] The multi-camera system collects object images from multiple angles, and uses the calibration parameters of the multi-camera to complete the 3D reconstruction of the real world. The present invention relates to a multi-camera system comprising n time-of-flight depth cameras {C 1 ,C 2 ,...,C i ,...,C n} external parameter calibration. For the sake of simplicity, in the following embodiments, the simplest multi-camera system including three cameras is used for illustration. Those skilled in the art should understand that when the number of cameras in the system is more than three, the method of the present invention is still applicable, and is not limited to the three-time-of-flight depth camera system in this embodiment.
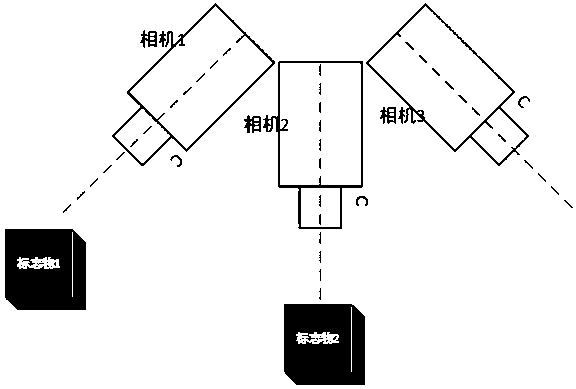
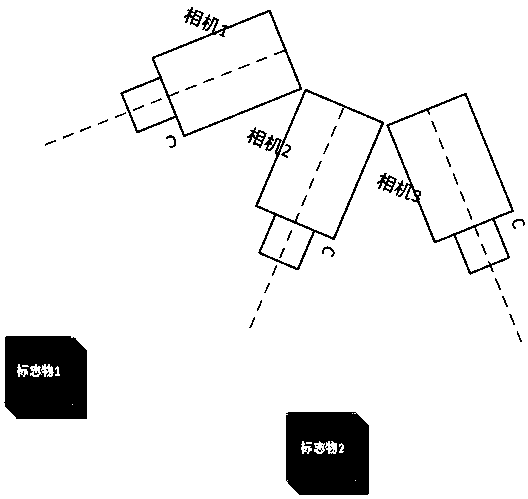
[0030] In the three-time-of-flight depth-of-flight camer...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More