

Hydraulic driving articulated-type legged robot inter-joint decoupling control method
A technology of robot joint and decoupling control, which is applied in the direction of adaptive control, general control system, control/regulation system, etc., and can solve problems such as complex system control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
[0058] Example: Decoupling control problem between the joints of the upper and lower legs of a hydraulically driven articulated foot robot
[0059] Step A. Establish a cross-link coupling model between the thigh and calf joints:
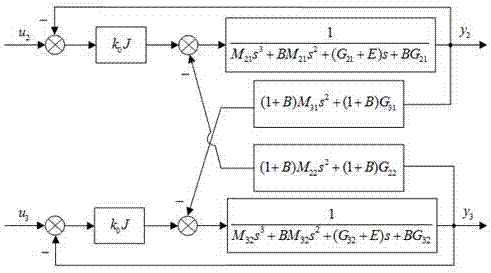
[0060]In this application, the joint coupling of machine and fluid is studied as the coupling behavior of hydraulically driven articulated footed robots. Based on the analysis of the leg mechanical structure and hydraulic servo drive system of hydraulically driven articulated footed robots, according to the mechanism Control principle, establish the dynamic model of the robot leg mechanism and the model of the hydraulic servo drive system of the leg, and finally establish the coupling model of the two joints of the robot's thigh and calf to provide a basis for the decoupling control of the robot. The principle of the coupling relationship The block diagram is attached figure 1 shown.
[0061] attached figure 1 in, u 2 Input voltage for thigh join...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More