

Integrated location method based on unscented Kalman filtering
An unscented Kalman and combined positioning technology, which is applied in positioning, radio wave measurement system, measuring device, etc., can solve the problems of positioning where multipath interference cannot be achieved, and achieve good fusion effect, good stability and strong reliability Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
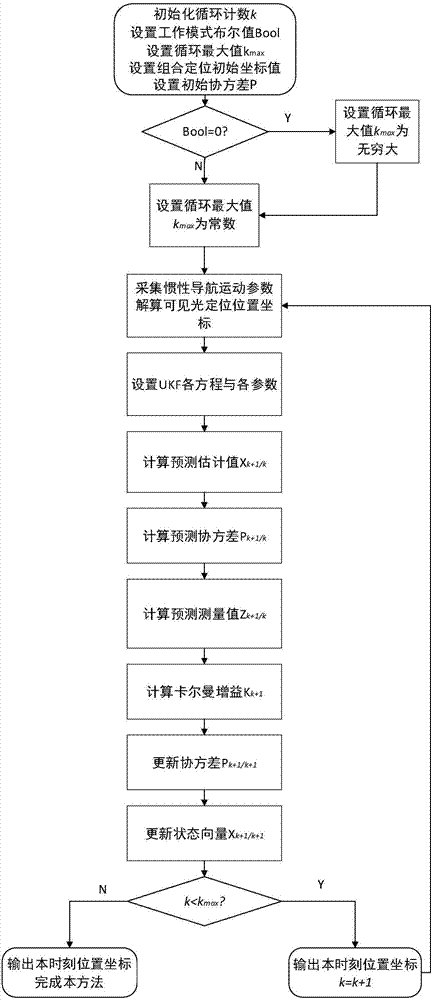
[0074] Taking the AGV visible light / inertial combined positioning system as an example, the "a visible light positioning / inertial navigation combined positioning method based on unscented Kalman filter" of the present invention is used to realize the combined positioning of visible light positioning / inertial positioning, and the specific steps are as follows figure 1 shown.
[0075] Step A: The system initialization unit initializes the loop count value k, sets the working mode Boolean value Bool; sets the loop maximum value k max ;Set the combined positioning initial coordinate value at time k=1, and set the initial covariance;
[0076] Specifically in this embodiment, k is initialized to 1; set the initial covariance P=0;
[0077] Step B: Determine whether the Bool value is 0, and perform corresponding operations:
[0078] If yes in step B.1, correspond to figure 1 "Bool=0?" in the Y output, set the loop maximum k max is infinity;
[0079] Step B.2 If no, corresponding ...
Embodiment 2
[0098] Taking the combined visible light / inertial navigation positioning system for pedestrian navigation as an example, the "a visible light positioning / inertial navigation combined positioning device based on unscented Kalman filter" of the present invention is used to realize the combined positioning of visible light positioning / inertial positioning:
[0099] Step a: the system initialization unit initializes the cycle count value, sets the Boolean value of the working mode and the maximum value of the cycle count, sets the combined positioning initial coordinate value at k=1, and sets the initial covariance, specifically the same as step A;
[0100] Step b: Determine whether the Bool value is 0, and perform corresponding operations, the details are the same as step B:
[0101] Step c: The inertial navigation unit collects the motion parameters of the inertial navigation, and the visible light positioning unit calculates the coordinates of the visible light positioning posit...
Embodiment 3
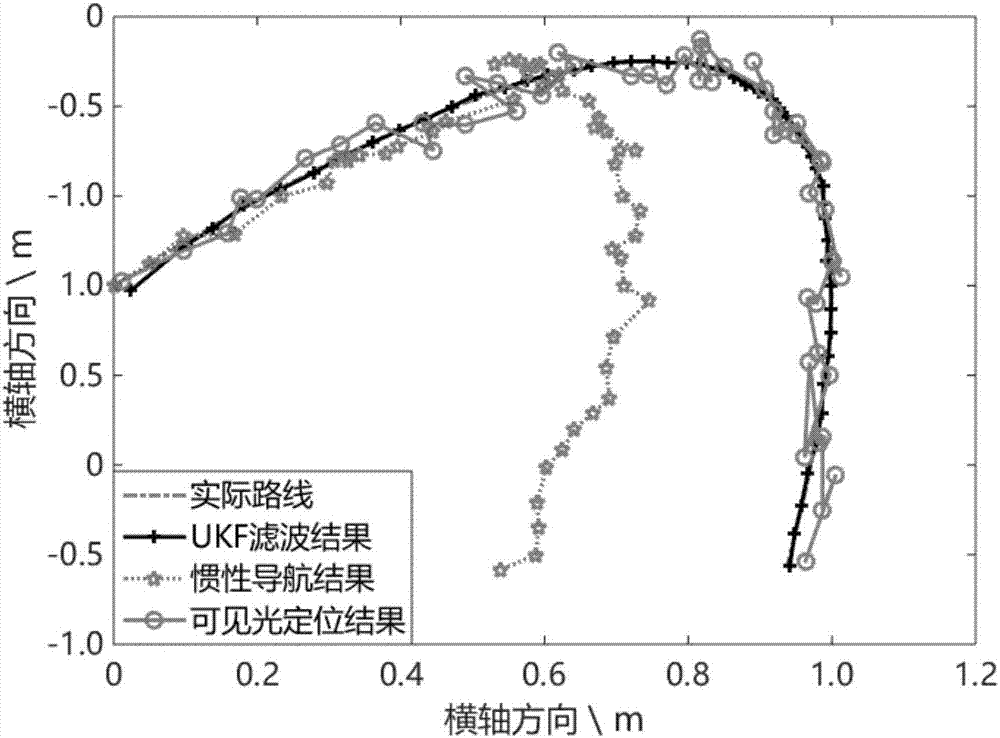
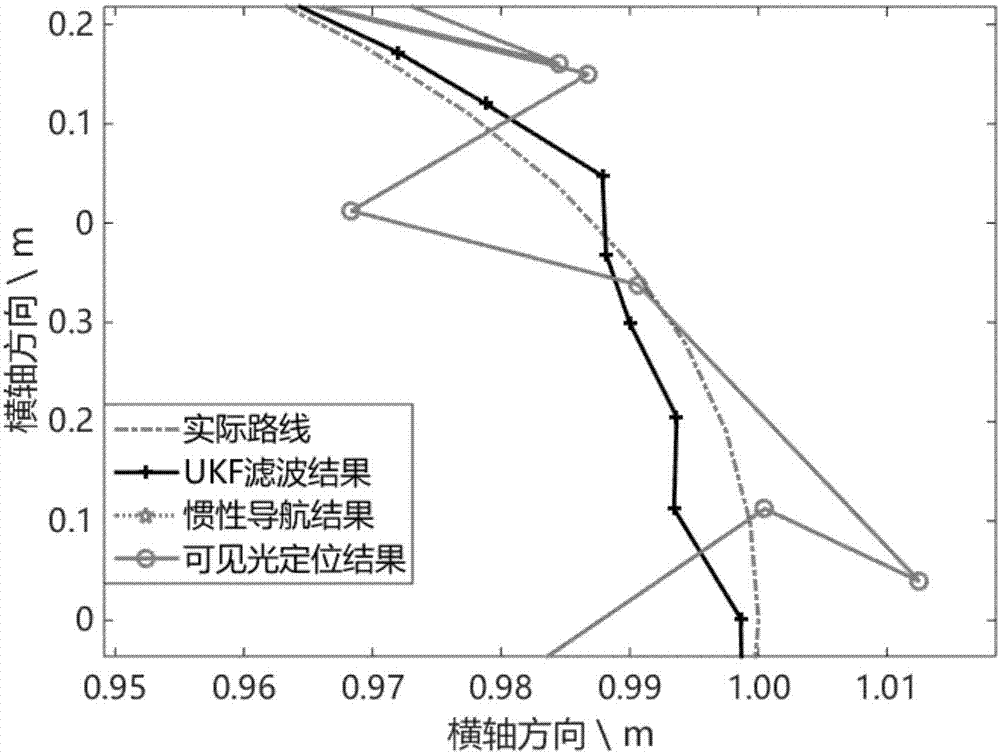
[0117] According to the parameters described in Example 1, this embodiment specifically elaborates the combined positioning position results obtained by performing steps A to C of the present invention, and compares them with the positioning position results obtained by the existing visible light positioning method and inertial navigation method. The comparison results are as follows figure 2 .
[0118] figure 2 Among them, the units of the horizontal axis and the vertical axis are meters; the dotted line "actual route" is the real trajectory of the AGV trolley; The combined positioning position trajectory calculation results obtained from steps A to C of the filtered visible light combined positioning method; the star-dash line "inertial navigation result" is the positioning position track obtained by using the traditional inertial navigation method; the circled line "visible light positioning result" It is the positioning position trajectory obtained by the positioning me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More