Unmanned vehicle autonomous steering control system and method based on hybrid theory
A self-driving car and autonomous steering technology, applied in the control/regulation system, two-dimensional position/course control, vehicle position/route/height control, etc., can solve the unsolvable control requirements and control functions of the autonomous steering control system To achieve the effect of improving handling stability, improving steering performance, and overall optimizing system stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The following will be described in detail in conjunction with the accompanying drawings of the present invention.
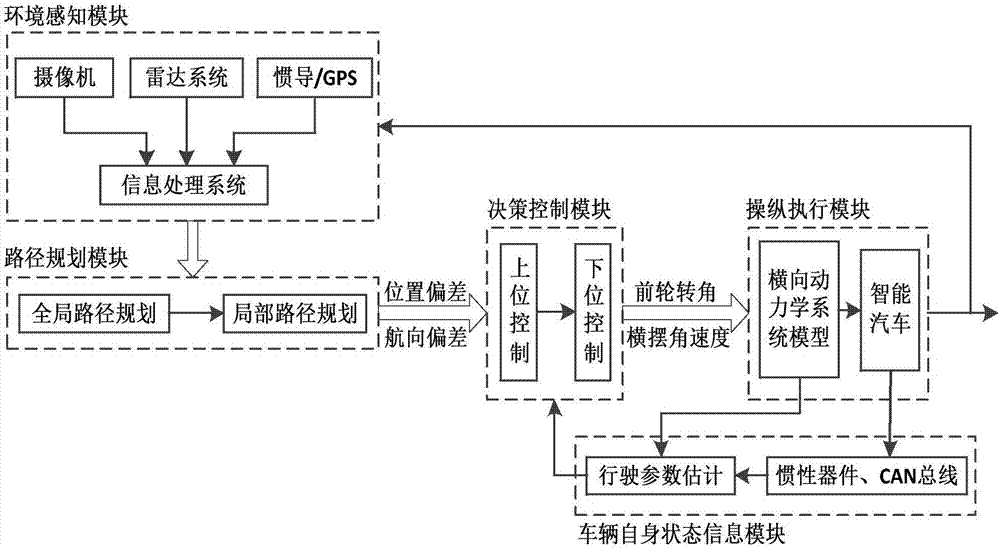
[0032] Such as figure 1 As shown, an autonomous steering control system for unmanned vehicles based on hybrid theory, including environment perception module, vehicle state information module, path planning module, decision-making control module, and manipulation execution module;
[0033] The environmental perception module includes a camera, radar system, inertial navigation / GPS positioning system, and information processing system. The camera is installed on the front and rear windshields of the vehicle to collect information such as lane lines, signs, traffic lights, etc.; the radar system is used to detect obstacles; The inertial navigation / GPS positioning system is used to obtain vehicle attitude parameters, speed and position information; the information processing system is used to process the information obtained by the camera, radar system, and i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com