Self-adaptive type inner pipe robot and pipe diameter self-adaptive, power-off protection and crawling method thereof
An adaptive and robotic technology, applied in the field of robotics, can solve the problems that pipeline robots are difficult to adapt to the change of pipeline diameter, so as to prevent sliding or falling, improve safety and reliability, and reduce self-weight.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
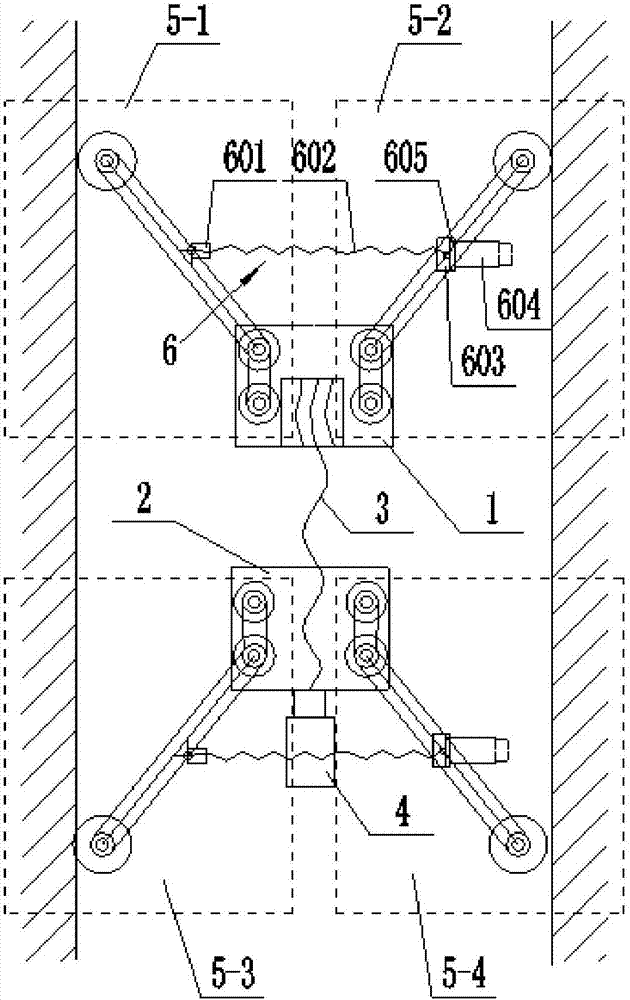
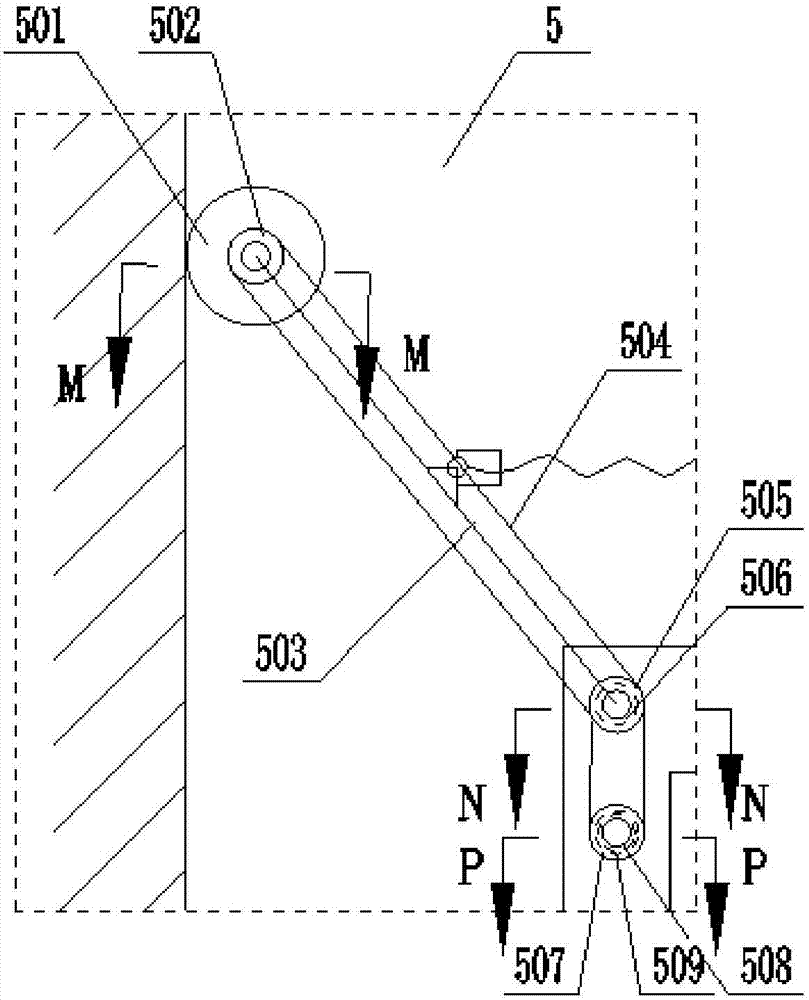
[0039] Such as figure 1 As shown, an adaptive in-pipe robot of this embodiment is mainly composed of a fuselage, a climbing mechanism 5, and a climbing adjustment mechanism 6. Among them, the climbing mechanism 5 is used to support the fuselage and realize the crawling and climbing of the robot in the pipeline. The adjustment mechanism 6 can adjust the support width of the climbing mechanism 5, so that the robot can adapt to crawling of pipes of different diameters. Each part is described in detail below.
[0040] Combine figure 1 with figure 2 As shown, the climbing mechanism 5 has four mechanisms at the corners of the fuselage, which are respectively an upper left climbing mechanism 5-1, an upper right climbing mechanism 5-2, a lower left climbing mechanism 5-3, and a lower right climbing mechanism 5-4. , Their structures are the same, the climbing adjustment mechanism 6 is installed between the upper left climbing mechanism 5-1 and the upper right climbing mechanism 5-2, and ...
Embodiment 2
[0045] This embodiment is an adaptive method for the pipe diameter of an adaptive in-pipe robot. The adaptive in-pipe robot of embodiment 1 can be adapted to different pipe diameters. The operation steps are as follows: the climbing adjustment mechanism 6 operates and the motor 604 is adjusted. , The adjustment screw 602 is driven to rotate, and the angle between the swing rod 503 of the left upper climbing mechanism 5-1 and the swing rod 503 of the right upper climbing mechanism 5-2 is increased or decreased through the adjustment nut, and the left lower climbing mechanism 5- The angle between the swing rod 503 of 3 and the swing rod 503 of the lower right climbing mechanism 5-4 is increased or decreased, so that the roller 501 of the climbing mechanism 5 always presses the inner surface of the pipe; in this process, the sensor 605 The thrust of the adjusting screw 602 is detected, and the signal is transmitted to the control system. The control system controls and adjusts the ...
Embodiment 3
[0049] This embodiment is an adaptive power-off protection method for an in-tube robot. In the event of an accidental power-off, the robot can be locked to prevent the robot from falling or sliding due to gravity, thereby improving the operating safety of the robot.
[0050] The structure of the self-adaptive in-tube robot is basically the same as that of the first embodiment. The difference is that the driving motor 508 is connected to the driving wheel 507 through an electromagnetic clutch 509. The electromagnetic clutch 509 adopts an electromagnetic overrunning clutch. Override, the inner and outer rings are locked in the power-off state. The electromagnetic clutch 509 is relatively mature in the prior art, and its structure will not be described in detail here; at the same time, the adjustment screw 602 and the adjustment nut in the climbing adjustment mechanism 6 adopt trapezoidal thread cooperation , With self-locking function.
[0051] The steps of the power failure protecti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More