

Civil unmanned aerial vehicle (UAV) air traffic control system and method for realizing flight control on unmanned aerial vehicles by adopting same
A technology for flight control and system implementation, applied in aircraft traffic control, multi-aircraft traffic management, traffic control systems, etc. Expanded, wide-ranging effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
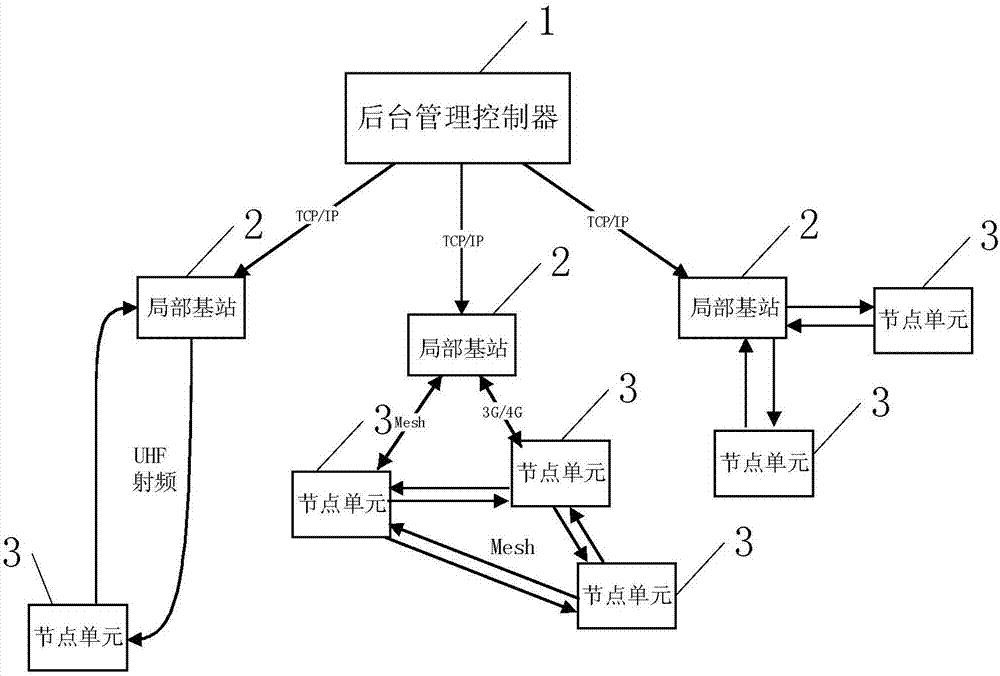
[0023] Specific implementation mode one: see figure 1 Describe this embodiment, the civil unmanned aerial vehicle air traffic control system described in this embodiment, it comprises background management controller 1, local base station 2 and node unit 3;
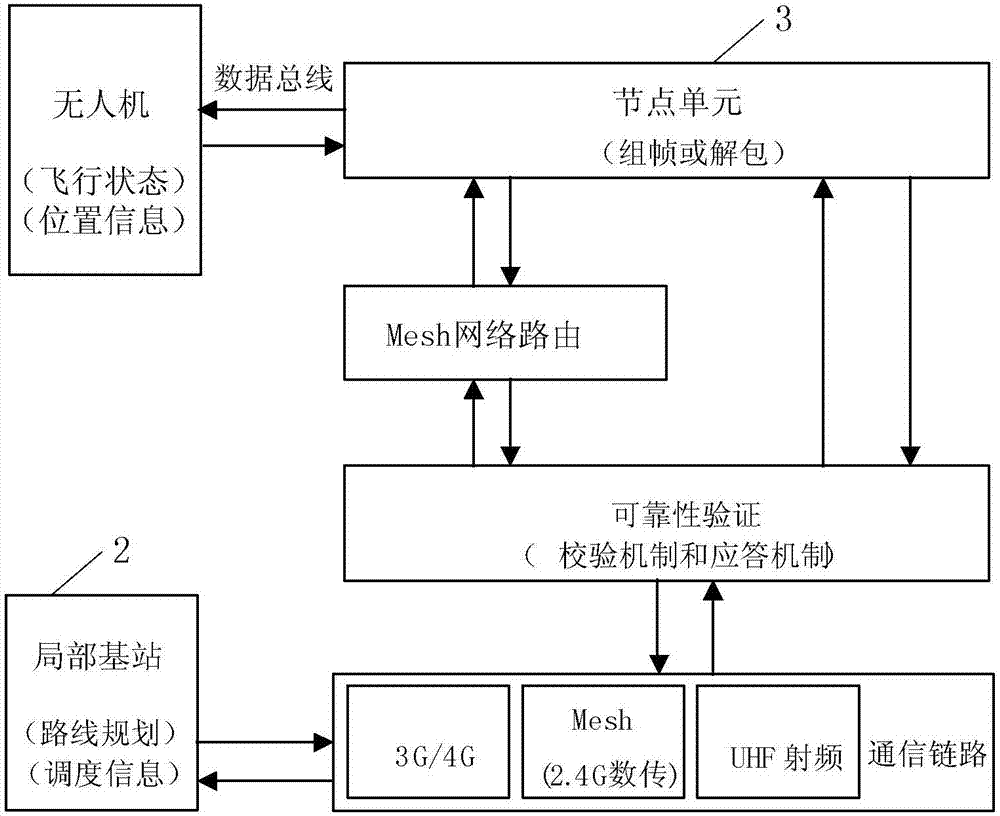
[0024] Each node unit 3 is correspondingly installed on an unmanned aerial vehicle, and each node unit 3 is correspondingly provided with an identity ID for identifying the identity of the unmanned aerial vehicle to which it belongs;
[0025] The node unit 3 is used to communicate with the controller on the UAV in real time, and after packaging the acquired flight data of the UAV, send it to the local base station 2 from the communication link;
[0026] The local base station 2 is used to plan and dispatch the UAVs corresponding to each node unit 3 within its management radius, and is also used to communicate with the background management controller 1 to transmit the flight data of the UAVs to In the database of backgro...
specific Embodiment approach 2
[0030] Specific implementation mode two: see figure 1 This embodiment is described. The difference between this embodiment and the civilian UAV air traffic management system described in Embodiment 1 is that the communication link includes a 3G / 4G network, a Mesh network, and a UHF wireless radio frequency communication network.
[0031] In this embodiment, the communication modes between the node unit and local base stations are diversified. There are three physical layer communication links between the node unit and the local base station, which are 3G / 4G network, mesh network (such as zigbee, etc.), UHF wireless radio frequency communication, and the appropriate mode can be switched according to different applications, such as in cities and towns The area can use 3G / 4G mobile network, use mesh network when the mobile network signal is poor and the range is close, and use UHF radio frequency communication when the distance from local base stations is far away.
[0032] For ...
specific Embodiment approach 3
[0033] Specific implementation mode three: see figure 1 and figure 2 Describe this embodiment, the difference between this embodiment and the civilian UAV air traffic management system described in the first embodiment is that when the number of node units 3 within the management radius of the local base station 2 is greater than or equal to 3, the local The base station 2 sends the IDs of other node units 3 within the early warning range of any node unit 3 within its management radius to the any node unit 3, and establishes a routing table through the Mesh network, and the any node unit 3 directly receives The location information of other node units 3 within its warning range.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More