

Hydraulic driving device
A driving device and hydraulic technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of flexible and bionic driving that cannot be applied to robots, and achieve the effect of reducing the overall structural weight, various structural designs, and small volume.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
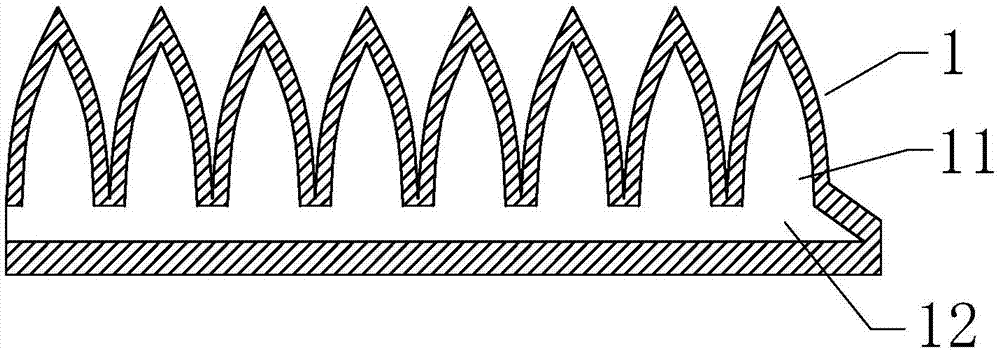
[0039] Refer to attached figure 1 , a unilateral hydraulic drive device, including a sac-shaped bending structure 1 and a hydraulic drive pump 2 arranged on one side, which changes the liquid volume in the sac cavity through the hydraulic drive system, and changes the shape of the sac cavity by the external pressure to complete actions such as rocking .
[0040] The above-mentioned sac-shaped curved structure 1 includes a liquid sac 11 and an integral through-type liquid channel 12 connecting multiple liquid sacs 11, wherein the cross-section of the liquid sac 11 is in the shape of scales, and the left end of the liquid channel 12 is the water inlet and outlet end, which is used to connect the hydraulic drive pump 2 It is used to fill or extract liquid, and the other end is sealed.
[0041] The capsule-shaped curved structure 1 is specifically made of flexible silicone material.
Embodiment 2
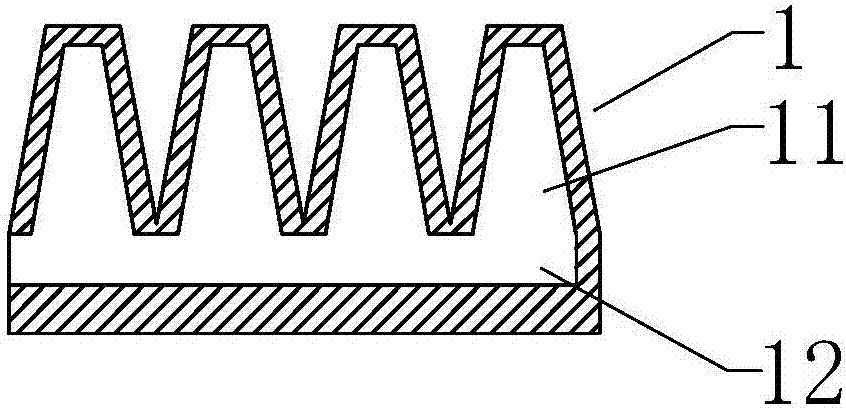
[0043] Refer to attached figure 2 , a unilateral hydraulic drive device, including a sac-shaped bending structure 1 and a hydraulic drive pump 2 arranged on one side, which changes the liquid volume in the sac cavity through the hydraulic drive system, and changes the shape of the sac cavity by the external pressure to complete actions such as rocking .
[0044] The above-mentioned sac-like curved structure 1 includes a liquid sac 11 and a liquid channel 12 connecting multiple liquid sacs 11, wherein the section of the liquid sac 11 is trapezoidal in shape, the height of the liquid sac 11 can be flexible depending on the specific situation, and the left end of the liquid channel 12 is connected to a hydraulic drive. The other end of the pump 2 is sealed, and the liquid channel 12 is closely connected with the hydraulically driven pump 2 in any manner.
Embodiment 3
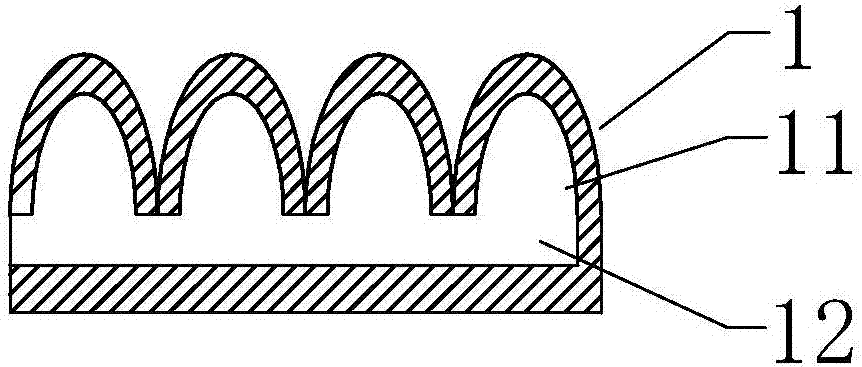
[0046] Refer to attached image 3 , a unilateral hydraulic drive device, including a bladder-like curved structure 1 and a hydraulic drive pump 2 .
[0047] The above-mentioned sac-like curved structure 1 includes a liquid sac 11 and a liquid channel 12 connecting multiple liquid sacs 11, wherein the section of the liquid sac 11 is semi-elliptical, the height of the liquid sac 11 can be flexible depending on the specific situation, and the left end of the liquid channel 12 is connected to the hydraulic pressure. The drive pump 2 is sealed at the other end, and the liquid channel 12 is tightly connected with the hydraulic drive pump 2 through threads and a rubber sealing structure.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More