

Collision detection method, device, equipment and storage medium for mechanical arms
A technology of collision detection and manipulator, which is applied in the direction of manipulator, program control manipulator, program control, etc., can solve the problems of missed judgment and lower detection accuracy, and achieve the effect of avoiding missed judgment and misjudgment and improving detection accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, but not to limit the present invention. In addition, it should be noted that, for the convenience of description, only parts related to the present invention are shown in the drawings but not all content.
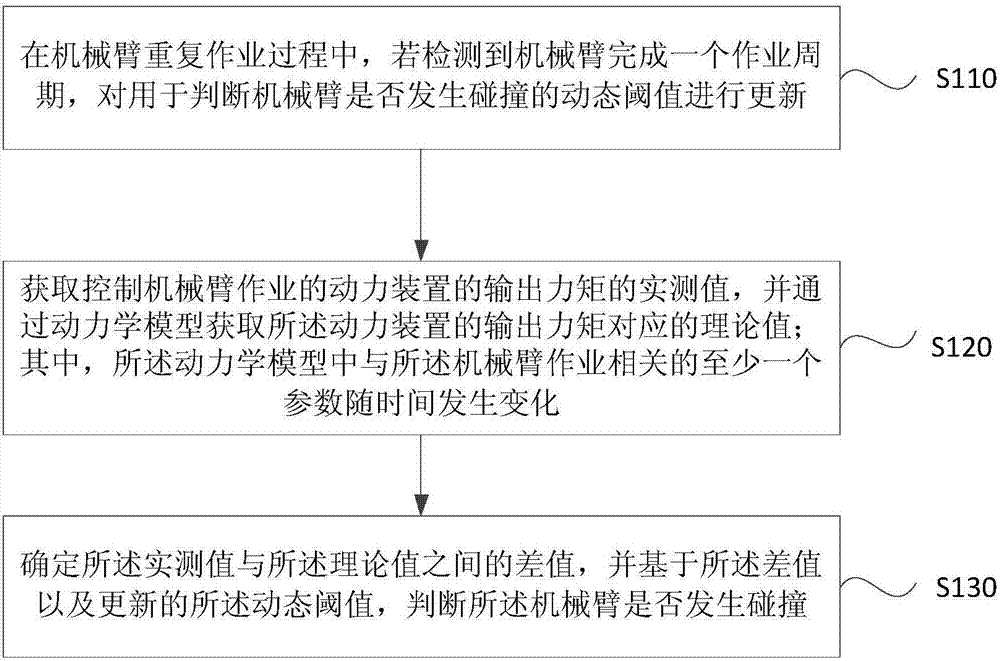
[0026] figure 1 This embodiment of the present invention provides a flow chart of a method for detecting collision of a robotic arm, the method is executed by a device for detecting collision of a robotic arm, the device is executed by software and / or hardware, and the device is configured in the detection device or control device. The method is applied to the collision detection scene during the long-term repeated operation of the mechanical arm, wherein the long time refers to the operation time exceeding the set time. Suc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More