

Intelligent wheelchair man-machine interaction control system and method based on eye movement recognition
A technology of motion recognition and control system, applied in the input/output of user/computer interaction, vehicle ambulance, patient's chair or special transportation tools, etc. The control effect is not ideal enough to achieve the effect of avoiding inflexible operation, diversified control methods and easy learning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings.
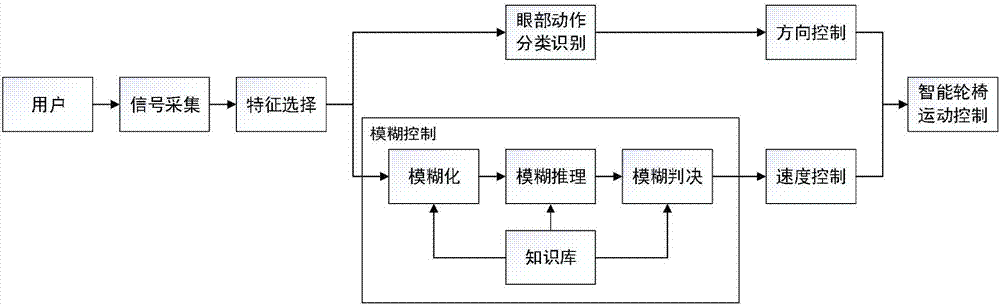
[0042] Such as figure 1 As shown, the present invention provides a smart wheelchair human-computer interaction device and control method based on eye movement recognition. The device is composed of electromyography collection, feature selection, eye movement recognition, fuzzy control, and motion drive. The specific implementation plan for each part will be described in detail.
[0043] Such as Figure 2 to Figure 4 As shown, the EMG acquisition part mainly includes the power module, ad623 amplifier, high-pass filter, low-pass filter, main amplifier and patch electrodes (such as figure 2 As shown), these components are integrated into a circuit board for use.
[0044] The EMG collection part is attached to the upper, lower and outer parts of the eye (such as image 3 The patch electrode shown) collects the ocular myoelectric signal. Since the huma...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More