

Control method of cable-driven series joint type S-shaped mechanical arm
A control method and technology of a robotic arm, which can be used in manipulators, program-controlled manipulators, manufacturing tools, etc., and can solve problems such as inapplicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
[0057] The principle of the inventive method is as follows:
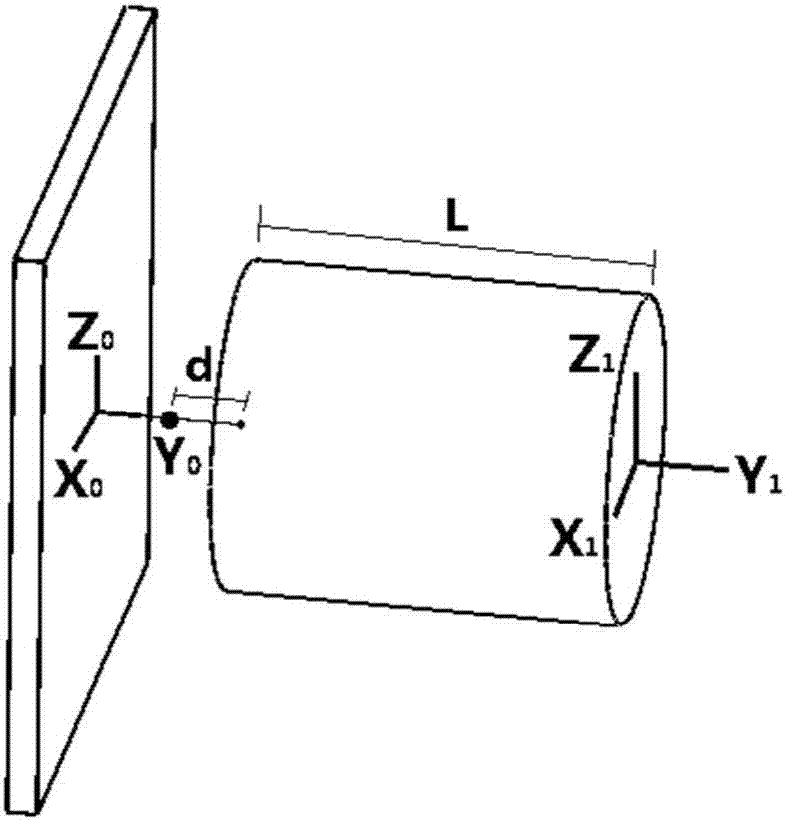
[0058] The total length of each joint is L+2d, where L is the distance between the front and rear ends of the joint, and d is the distance from the end face of the joint to the center of the adjacent universal joint.
[0059] Establish the following kinematic model based on geometric relations:
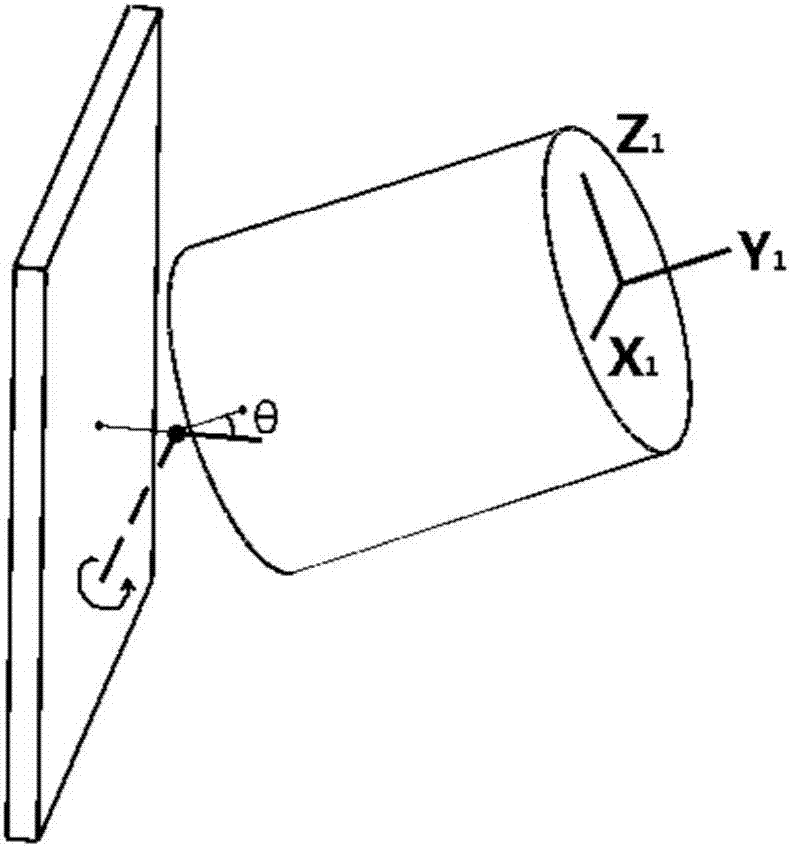
[0060] A) Construct an absolute coordinate system. When the joints of the robotic arm are arranged along the same straight line perpendicular to the arm base in the initial state, the center of the first universal joint is located on the Y axis, and the distance from the origin is d, as figure 2 shown.
[0061] For example, for the first joint, the initial position is when the axis of the first joint coincides with the Y-axis, and a reference coordinate system fixed to the first...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More