Moving device for gas pipeline inspection robot
A technology for inspection robots and mobile devices, applied in the field of robots, can solve problems such as insufficient power, insufficient driving force, and inability to guarantee torque effects, etc., and achieve the effects of strong adaptability, good mobile stability, and good maneuverability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The following descriptions are only preferred embodiments of the present invention, and therefore do not limit the protection scope of the present invention.
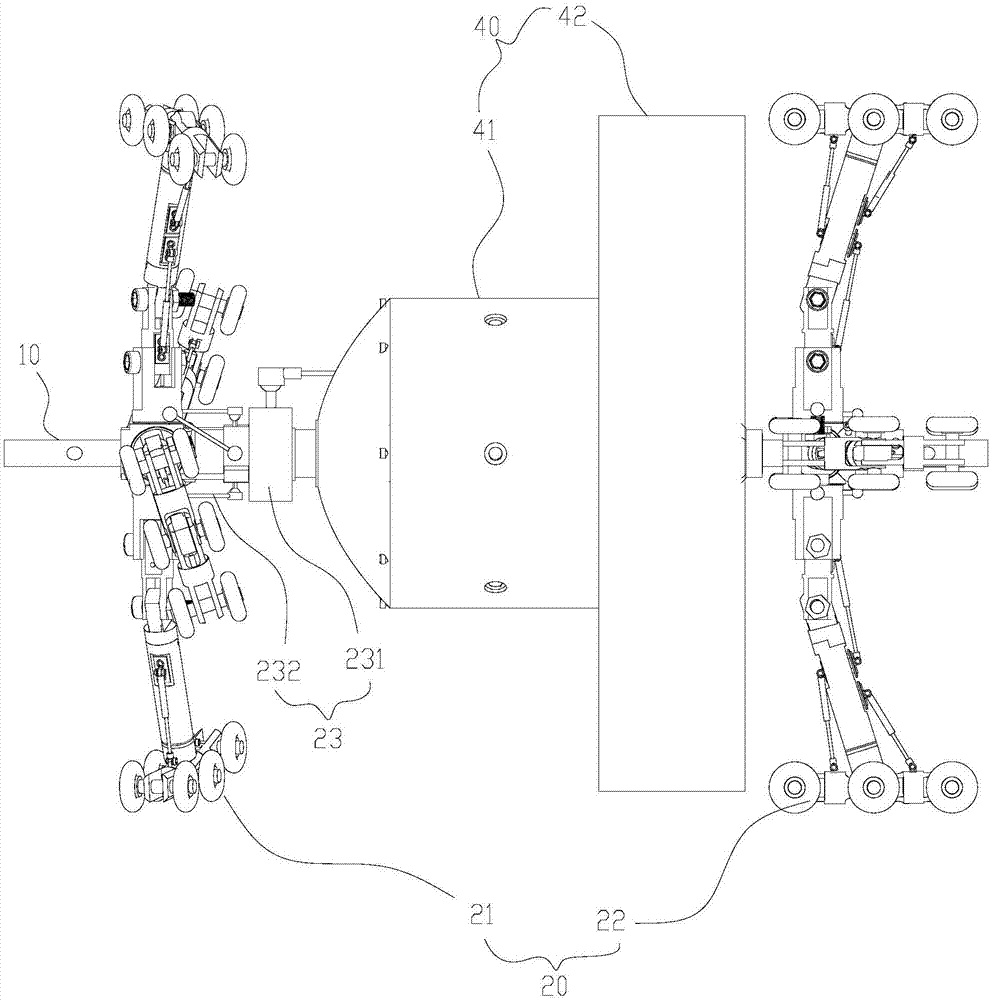
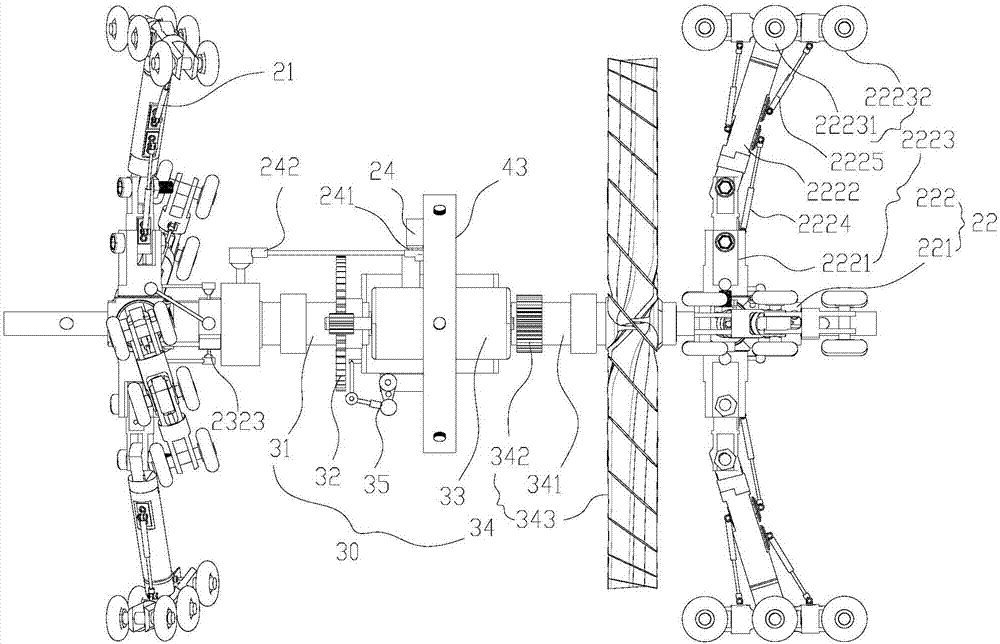
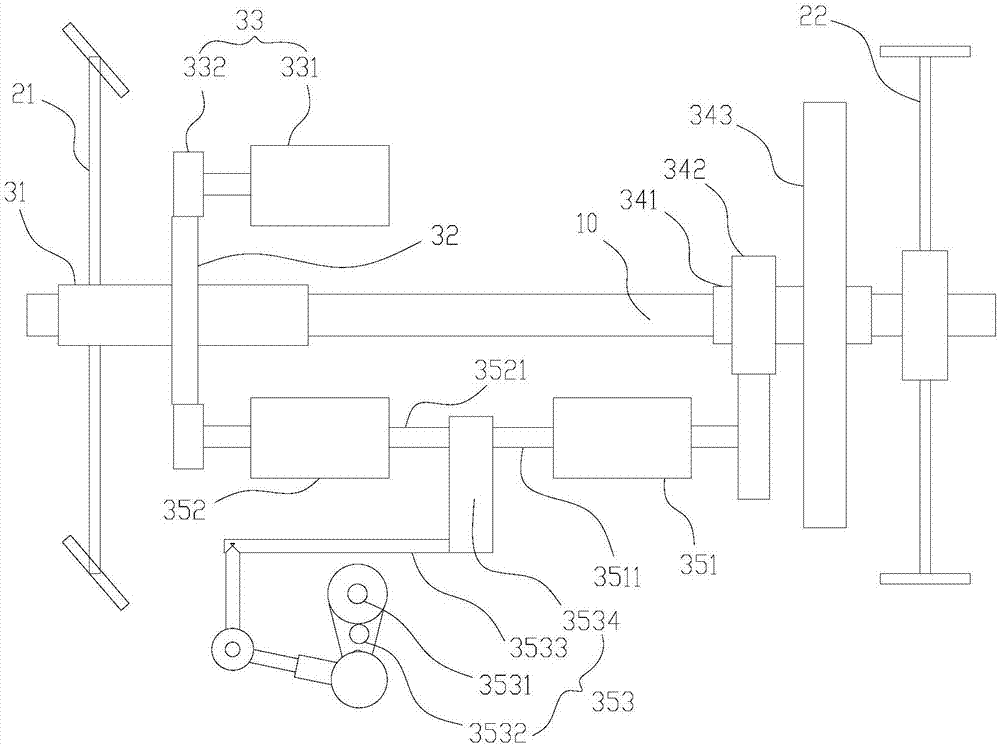
[0026] Examples, see figure 1 and figure 2 Shown: the present invention provides a kind of inspection robot that is used for gas pipeline. The inspection robot includes a central support shaft 10, a mobile device 20 assembled on the central support shaft 10, and a hybrid power device 30, wherein the hybrid power device 30 is a power source of the inspection robot for driving the mobile device 20 to move, and the mobile device 20 is used to abut against the gas pipeline and move along the axial direction of the gas pipeline.
[0027] The moving device 20 includes a screw drive wheel device 21 and a balance wheel device 22 assembled to the central support shaft 10. The screw drive wheel device 21 and the balance wheel device 22 are all abutted against the pipe wall of the gas pipeline, and the screw drive wheel ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More