

Nonlinear control method of neural network based on imitated operant conditioned reflex
A non-linear control and conditioned reflex technology, applied in the directions of adaptive control, general control system, control/regulation system, etc., can solve the problems of short time and imperfect theoretical system of type III controller, and reduce manual parameter adjustment work. , improve the effectiveness, the effect of a wide range of system operating conditions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0051] The present embodiment imitates the neural network nonlinear control method of operant conditioning, and comprises the following steps:
[0052] Step 1. Establish an operant conditioning bionic model:
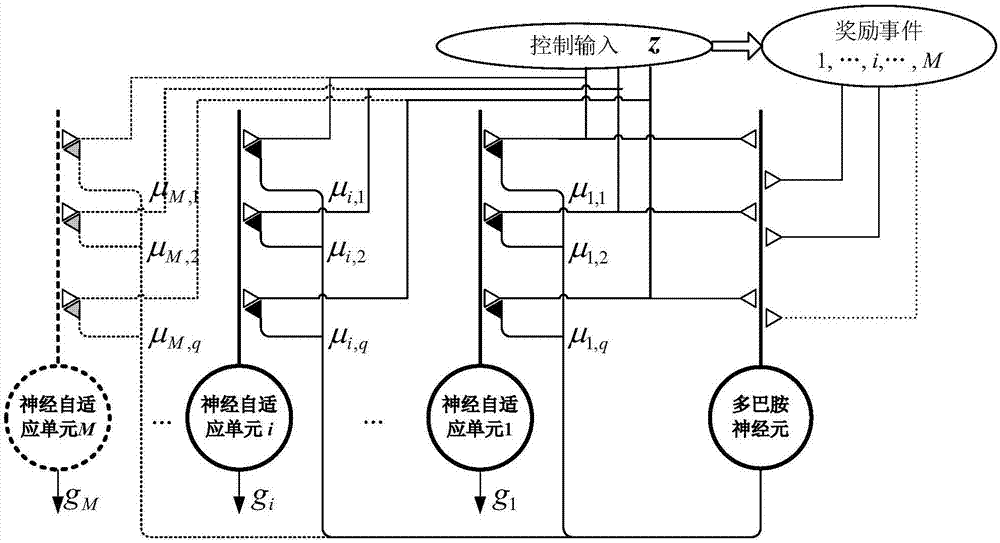
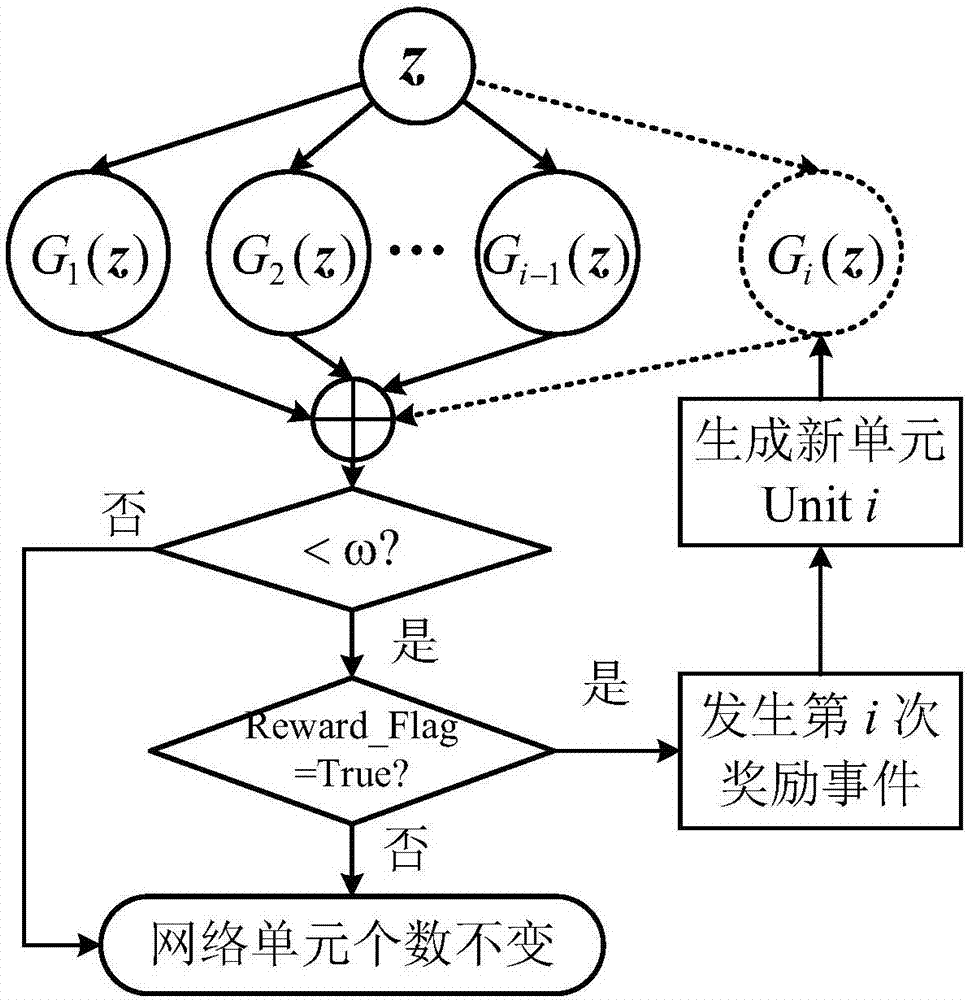
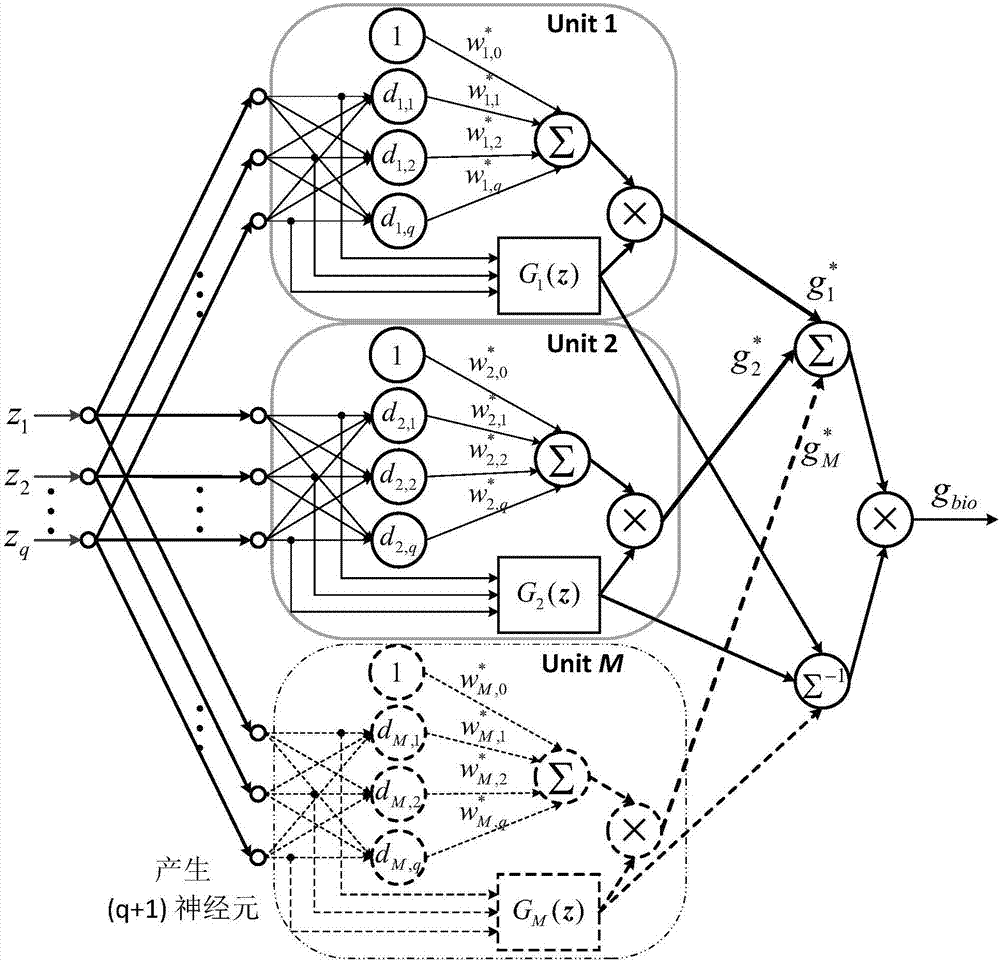
[0053] In the nervous system of higher organisms, neuron inclusions gather in the central nervous system to form neural nuclei, and neuron nuclei with similar functions gather to form neural nuclei. Inspired by this principle, the present invention classifies neurons in the network according to different neural activities, so that neurons with the same neural activity form a neural adaptive unit, and the overall network is composed of M neural units, then the i-th Neural activity of neurons:
[0054]
[0055] Among them, μ i ∈ R q , σ i ∈R is the parameter of the i-th neuron cluster, z=[z 1 ,z 2 ,...,z q ] T input to the neural network...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More