

Solar unmanned aerial vehicle route planning method based on day and night cycle flight
A solar drone and track planning technology, applied in three-dimensional position/channel control, non-electric variable control, instruments, etc., can solve problems such as gaps, few solar drone planning, etc., to lower the threshold and achieve day and night The effect of cyclic cruising and improving battery life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] A solar unmanned aerial vehicle track planning method based on day and night cycle flight provided by the present invention will be described in detail below in conjunction with the accompanying drawings.
[0038] The present invention provides a track planning method for solar unmanned aerial vehicle based on day and night cycle flight, by which the track can be generated to meet the day and night cycle flight under different dates and geographical conditions, so that the solar unmanned aerial vehicle can cruise around the clock .
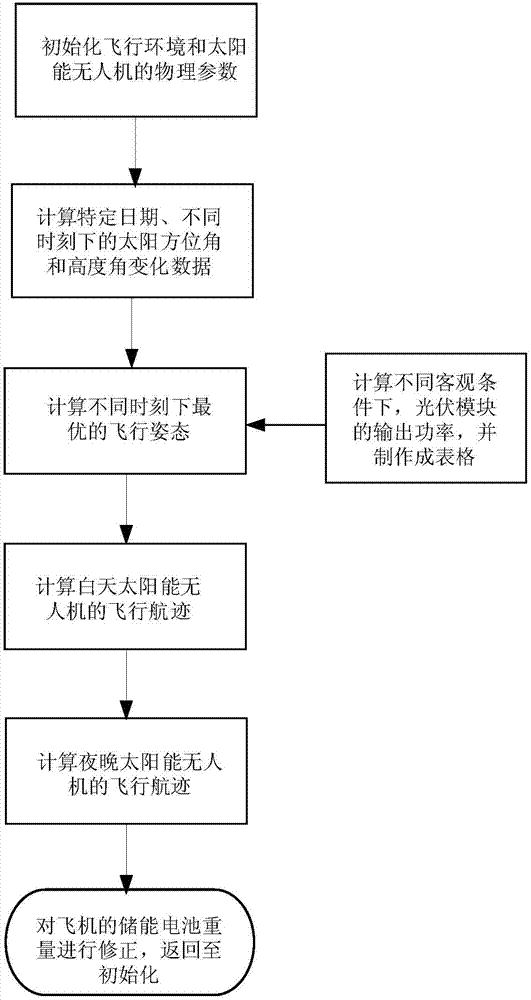
[0039] Described a kind of solar unmanned aerial vehicle track planning method based on day and night cycle flight, such as figure 1 The process shown includes the following steps:
[0040] Step 1: Initialize the flight environment and the physical parameters of the solar drone.
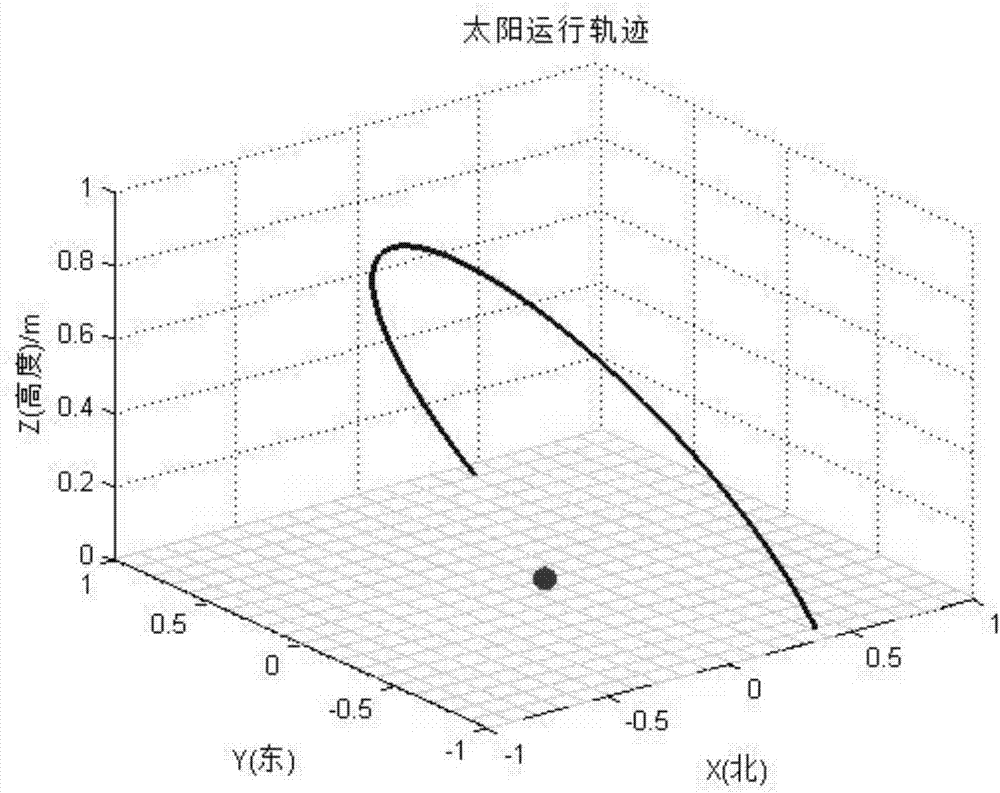
[0041] The flight environment includes the date of the specific flight, the spatial and geographic coordinates of take-off, and the statistical data of the irra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More