

A new type of quadrotor unmanned aerial vehicle control system
A four-rotor unmanned aerial vehicle and control system technology, applied in the field of four-rotor unmanned aerial vehicle control system, can solve the problems of reduced precision of aircraft parts and sensors, high failure rate, reduction, etc., to achieve flexible and diverse control methods, improve The effect of reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
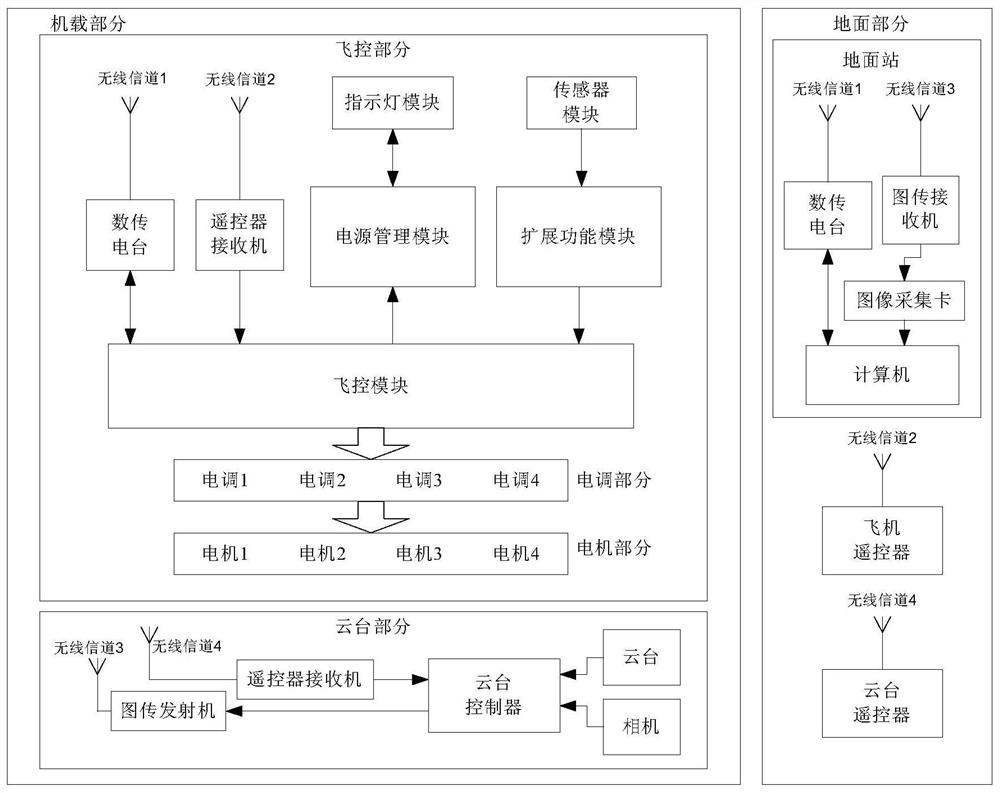
[0040] Such as figure 1 As shown, the quadrotor UAV control system of the present invention includes: an airborne part and a ground part. The airborne part is further divided into the flight control part and the gimbal part; the flight control part is composed of the flight control module, the extended function module, the power management The pan / tilt part is composed of the pan / tilt controller, the pan / tilt, the camera, the remote control receiver, and the image transmission transmitter.
[0041] (1) The sensor module includes an inertial measurement unit (IMU), GPS, barometer, and magnetic compass; the inertial measurement unit (IMU) is used to measure the attitude and position information of the drone, and send the detected signal to the extended function module; GPS It is used to detect the position information of the UAV, and send the detected signal to the extended function module; the barometer is used to measure the air pressure parameters of the UAV's location, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More