Magnetically driven mini-sized underwater robot and control method thereof
A magnetic drive and robotic technology, applied in the field of robotics, to achieve the effects of reducing interference, flexible and convenient use, and novel control methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
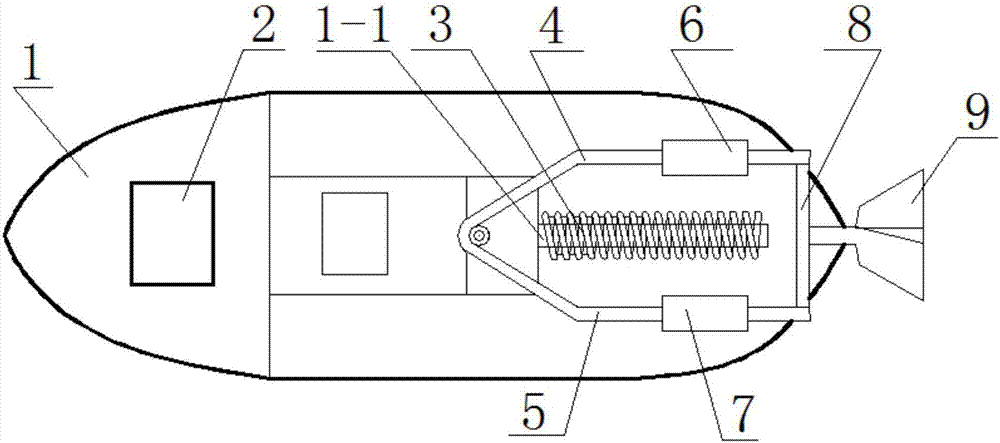
[0041] Such as figure 1 , figure 2 , image 3 As shown, the magnetically driven miniature underwater robot of the present invention includes a body 1 and a fishtail drive assembly. The fishtail drive assembly includes at least one coil 3 and a tail swing mechanism. The tail swing mechanism has a pair of opposite magnetic blocks with opposite polarities. The coil 3 is energized to attract or repel the magnetic block to provide power for the tail swing mechanism.
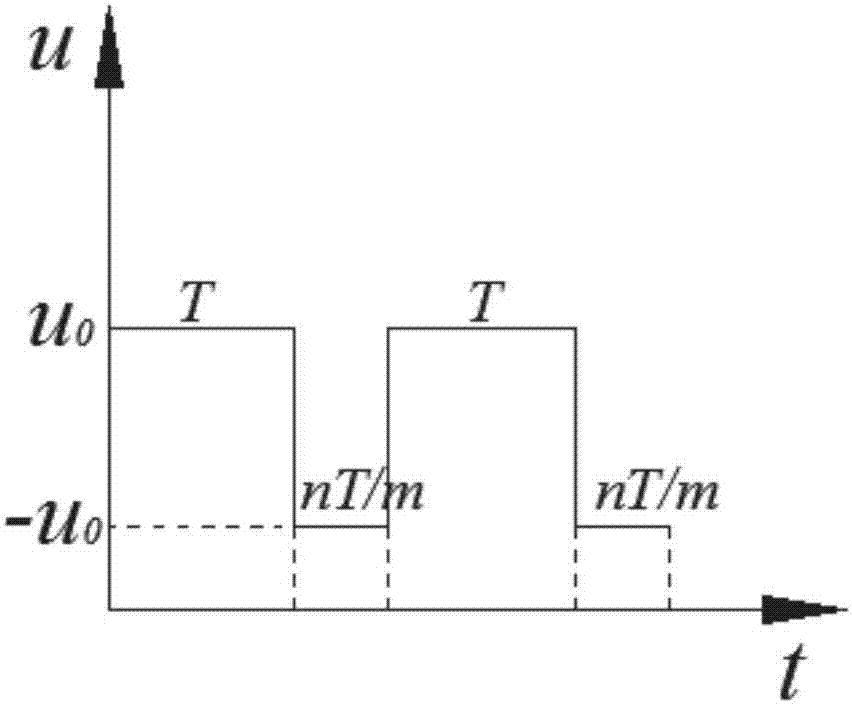
[0042] The present invention uses the coil 3 to cooperate with the magnetic block. When the current flows to the coil 3, the generated magnetic field interacts with the magnetic field of the magnetic block. One side generates suction force, and the other side generates thrust force. When the current direction changes, The direction of the force also changes accordingly, thereby pushing the tail to produce a swinging effect, and then pushing the whole body forward, while changing the power-on time to realize directi...
Embodiment 2
[0049] Such as Figure 4 As shown, the magnetic drive type underwater robot of the present embodiment, on the basis of embodiment 1, the central axis of the coil 3 is perpendicular to the upper magnetic block 6 or the lower magnetic block 7, because the magnetic properties of the coil 3 at two stages are the largest, it can Increase the swing force of empennage 9, thereby increase the propulsion of robot.
Embodiment 3
[0051] Such as Figure 5 As shown, the magnetic drive type underwater robot of the present embodiment, on the basis of Embodiment 1, the number of coils 3 is three, and three coils 3 are arranged in parallel, and one of the coils 3 is located at the upper magnetic block 6 and the lower magnetic block 7, one coil 3 is located outside the upper magnetic block 6, and one coil 3 is located outside the lower magnetic block 7. Three coils 3 are used to realize the control of the upper magnetic block 6 and the lower magnetic block 7, thereby further increasing the size of the empennage. 9 swing force, so as to increase the propulsion of the robot. This method can be used when the robot has a large load or needs to swim quickly, and the robot volume is not required.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com