

Method for selecting autonomous landing area of unmanned aerial vehicle under complex environment based on visual SLAM
A technology for complex environment and area selection, applied in attitude control, three-dimensional position/channel control and other directions, can solve problems such as poor practicability and achieve good practicability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
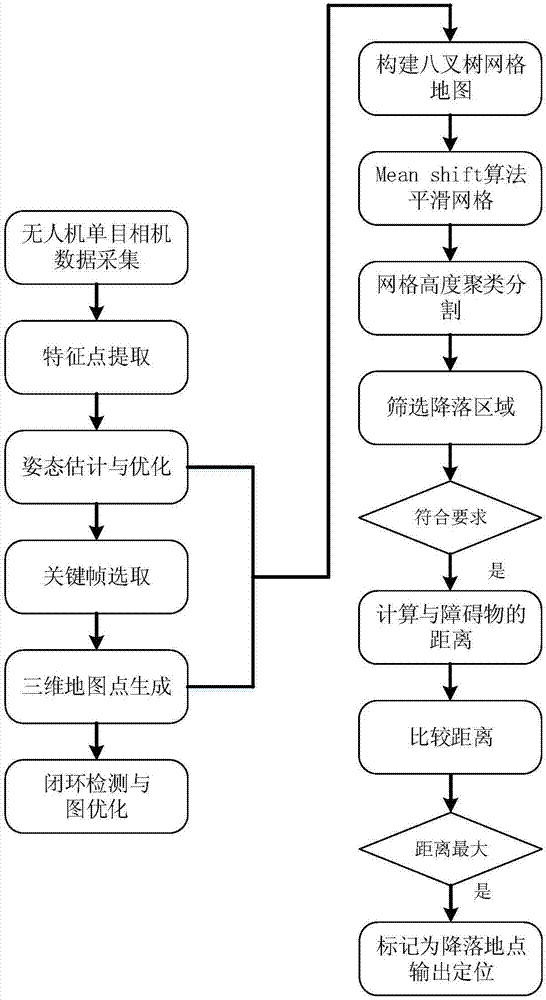
[0042] refer to figure 1 . The specific steps of the method for selecting the autonomous landing area of the UAV in a complex environment based on visual SLAM in the present invention are as follows:
[0043] 1. Camera internal reference calibration.
[0044] Because the internal parameter matrix of the camera needs to be known in the process of pose calculation, the monocular camera onboard the drone is used to collect 20 images of the calibration board first, and Zhang’s calibration method is used to calibrate the internal parameters of the camera with the Matlab toolkit .
[0045] 2. Simultaneous positioning and mapping.
[0046] If the scene is a plane, or approximately a plane, or when the parallax is small, motion estimation can be performed through homography. However, using the basic matrix F to restore motion requires the scene to be a non-planar scene with large parallax. Although the camera is facing the ground, the data captured by the drone may have uneven ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More