

Method for visualizing three-dimensional environmental map in virtual reality system
An environment map and virtual reality technology, applied in the field of virtual reality, can solve the problems of difficult parameter selection, large amount of live video image data, video streaming delay, etc., to reduce network communication bandwidth requirements, reduce communication bandwidth requirements, and compress The effect of the amount of map data
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with the accompanying drawings and specific preferred embodiments, but the protection scope of the present invention is not limited thereby.
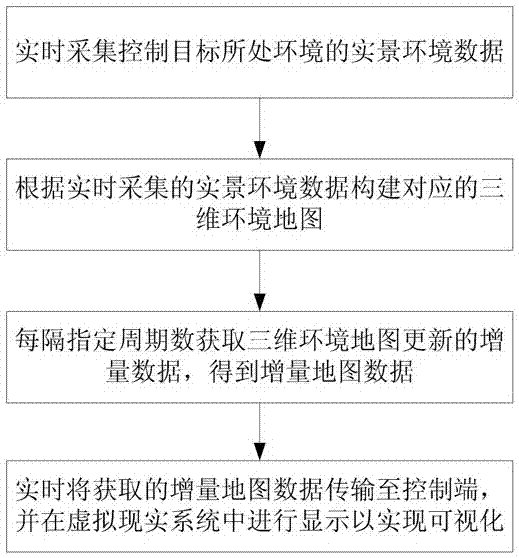
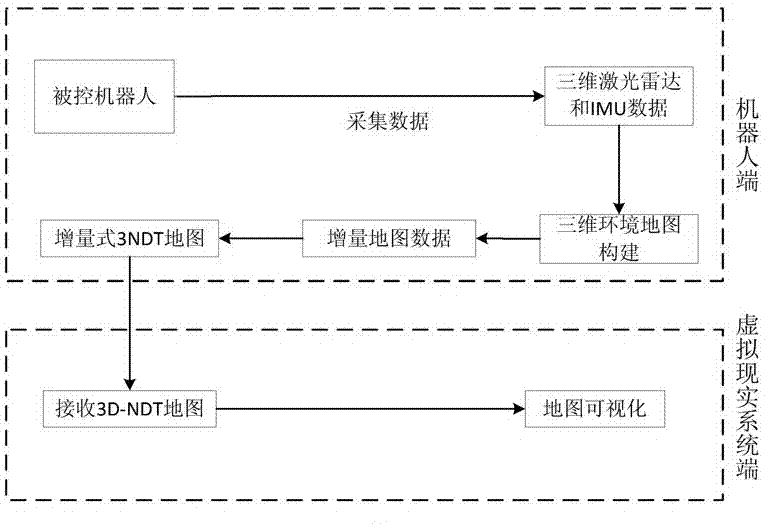
[0033] Such as figure 1 , 2 As shown, the steps of the visualization method of the three-dimensional environment map in the virtual reality system of this embodiment are as follows:
[0034] S1. Real-time collection of real-time environmental data of the environment where the control target is located.
[0035] The control target is the remote-controlled robot, which can be an aircraft, land mobile robot or underwater robot, etc. By arranging collection equipment on the robot side, the real-time environmental data of the scene where the robot is located is collected in real time.
[0036] In a specific application example, the real-scene environmental data of the environment where the control target is located is collected through the lidar and IMU (inertial m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More