

Method and apparatus for avoiding obstacle automatically
An automatic obstacle avoidance and unified technology, applied in the direction of two-dimensional position/channel control, etc., can solve the problems of inability to identify and avoid obstacles, and achieve the effect of avoiding obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
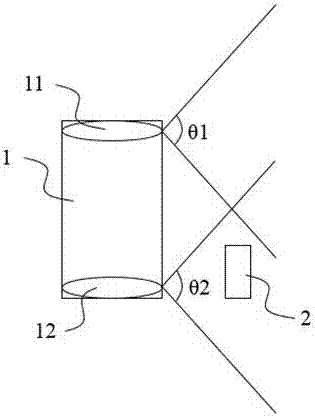
[0035] see figure 1 , the mobile device 1 is loaded with a first scanning and ranging module 11 placed on its top and a second scanning and ranging module 12 placed at its bottom. The first scanning ranging module 11 scans from top to bottom in the vertical direction, and the scanning angle range is θ1. The second scanning ranging module 12 scans from bottom to top in the vertical direction, and the scanning angle range is θ2. The scanning ranging module is a laser scanning ranging sensor, the horizontal scanning angle ranges from 0° to 360°, and the vertical scanning angle ranges from -40° to 40°.
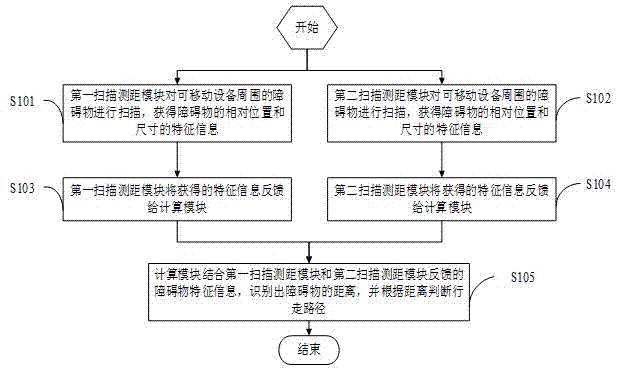
[0036] see figure 2 , showing a schematic flow chart of the automatic obstacle avoidance, the method may include:
[0037] Step S101: the first scanning ranging module 11 scans the obstacles around the mobile device 1, and obtains characteristic information of the relative positions and sizes of the obstacles.
[0038] Step S102: the second scanning ranging module 12 scans th...
no. 2 example
[0046] see image 3 , the mobile device 1 is loaded with a first scanning and ranging module 11 placed on its top and a second scanning and ranging module 12 placed at its bottom. The first scanning ranging module 11 scans from top to bottom in the vertical direction, and the scanning angle range is θ1. The second scanning ranging module 12 scans from bottom to top in the vertical direction, and the scanning angle range is θ2. The scanning ranging module is a laser scanning ranging sensor, the horizontal scanning angle ranges from 0° to 360°, and the vertical scanning angle ranges from -40° to 40°.
[0047] see figure 2 , showing a schematic flow chart of the automatic obstacle avoidance, the method may include:
[0048] Step S101: the first scanning ranging module 11 scans the obstacles around the mobile device 1, and obtains characteristic information of the relative positions and sizes of the obstacles.
[0049] Step S102: the second scanning ranging module 12 scans th...
no. 3 example
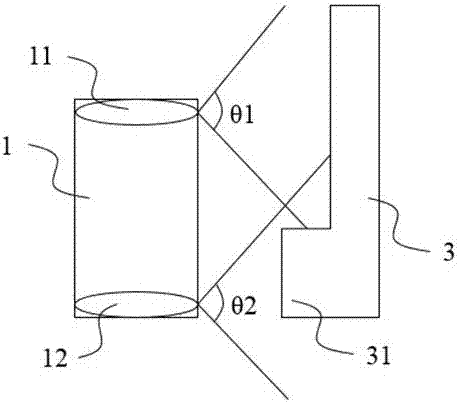
[0057] see Figure 4 , the mobile device 1 is loaded with a first scanning and ranging module 11 placed on its top and a second scanning and ranging module 12 placed at its bottom. The first scanning ranging module 11 scans from top to bottom in the vertical direction, and the scanning angle range is θ1. The second scanning ranging module 12 scans from bottom to top in the vertical direction, and the scanning angle range is θ2. The scanning ranging module is a laser scanning ranging sensor, the horizontal scanning angle ranges from 0° to 360°, and the vertical scanning angle ranges from -40° to 40°.
[0058] see figure 2 , showing a schematic flow chart of the automatic obstacle avoidance, the method may include:
[0059] Step S101: the first scanning ranging module 11 scans the obstacles around the mobile device 1, and obtains characteristic information of the relative positions and sizes of the obstacles.
[0060] Step S102: the second scanning ranging module 12 scans t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More