

Surgical instrument and minimally invasive surgical robot for minimally invasive surgical robot
A technique of surgical instruments and minimally invasive surgery, which is applied in the field of medical equipment and can solve problems such as inflexible robotic surgery
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
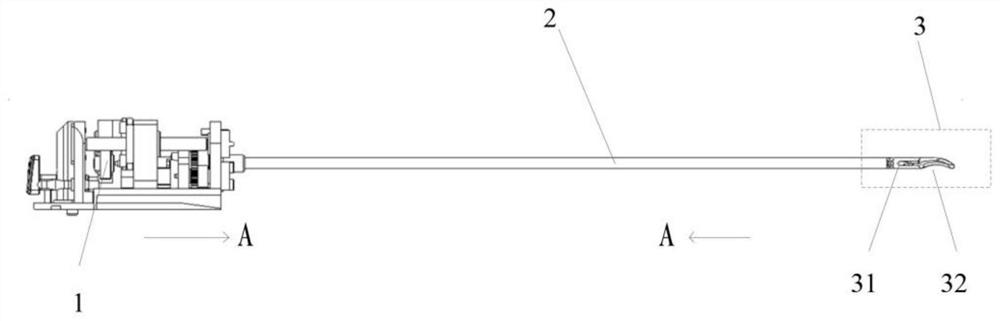
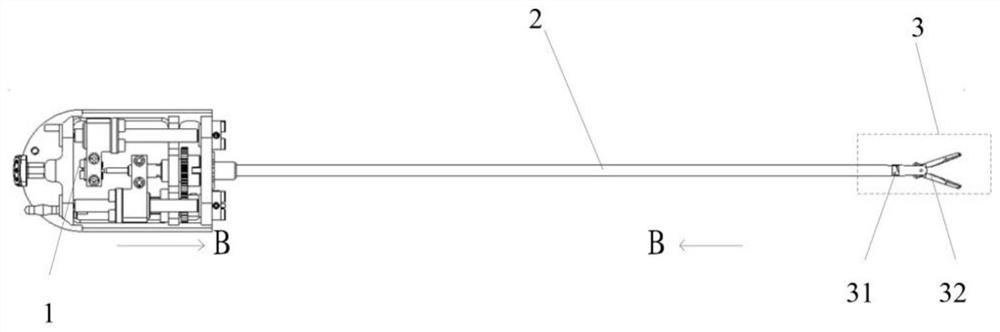
[0041] In order to solve the above technical problems, the general idea of the technical solution in the embodiment of the present invention is as follows: see Figure 1A , Figure 1B and Figure 2A-Figure 2D , a surgical instrument and a minimally invasive surgical robot for a minimally invasive surgical robot, comprising:
[0042] The front end driving part 1, the guide rod part 2, and the end effector 3 are sequentially connected, and the end effector 3 includes a sequentially connected wrist device 31 and an end effector 32;
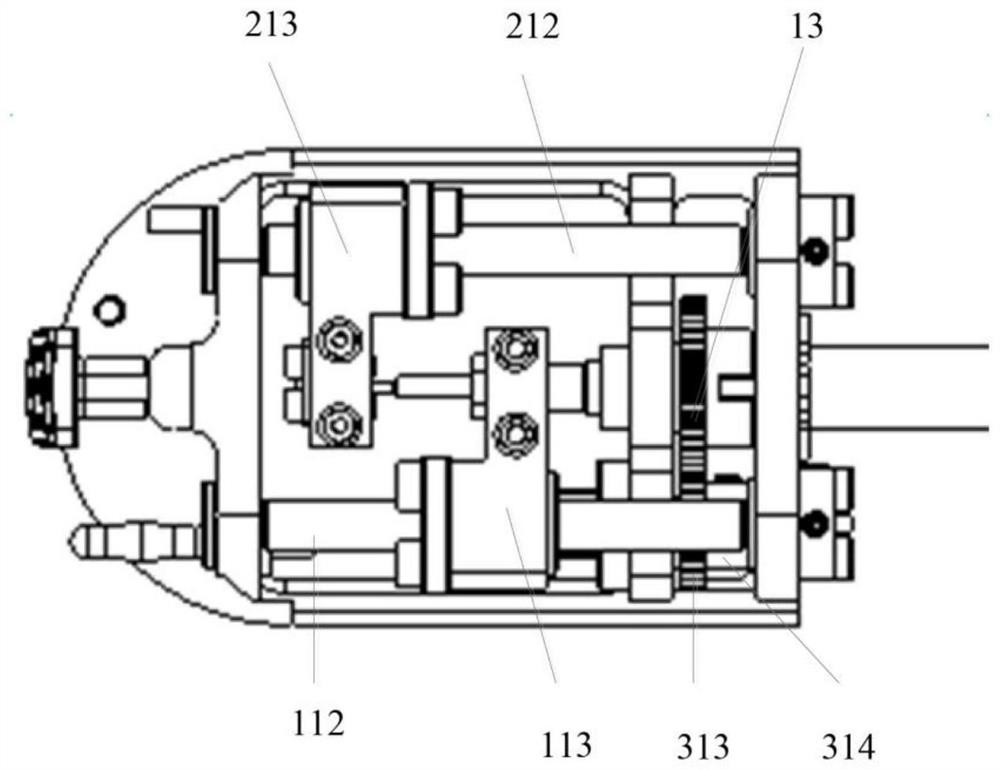
[0043] The front end driving part 1 comprises a yaw driving device, and the yaw driving device includes a first motor 111, a first transmission shaft 112, a first slider 113 and a first bearing 114, and the first motor 111 and the first transmission shaft 112 connected, the first transmission shaft 112 is connected with the first slider 113;
[0044] The guide rod part 2 includes a screw rod 20, a first sleeve 21 sleeved on the screw, and a secon...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More