

Target spatial intersection measurement method for full-view scanning and measuring system
A measurement system and space rendezvous technology, applied in the direction of measurement devices, optical devices, instruments, etc., can solve the problems of splicing image errors, the inability to measure the surface information of large components or equipment, and the limited measurement range, etc., to achieve high precision.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The specific implementation manner of the present invention will be described in detail below with reference to the drawings and embodiments.
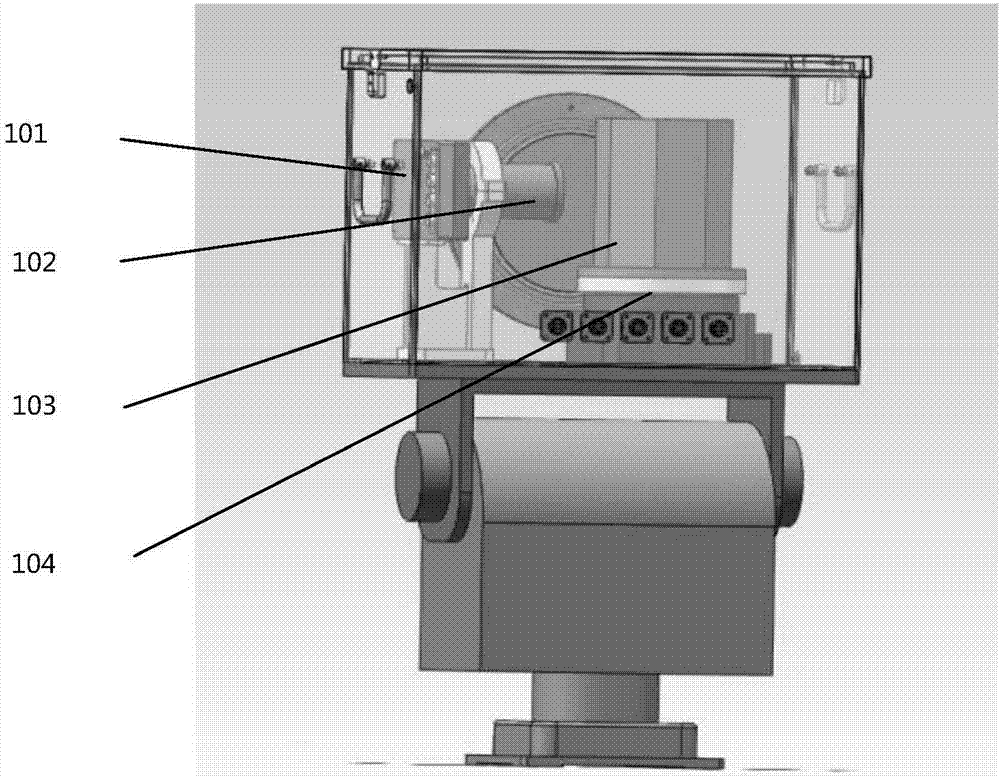
[0031] The full-view scanning measurement system includes a target, a measurement station, and a three-dimensional coordinate acquisition module in space. figure 1 It shows the structural diagram of the full viewing angle scanning measurement system of the embodiment of the present invention. Such as figure 1 As shown, the measuring station is composed of an octagonal mirror drum 103, a single-axis turntable 104, a line scan camera 102, an f-θ optical lens 101, and an image processing module.
[0032] Since each measurement station can scan the measurement field within 90 degrees in the horizontal direction and 90 degrees in the vertical direction, at least two scanning measurement workstations are required. When arranging these workstations, it is necessary to carefully adjust their positions so that they can be placed just t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More