

Self-locking intelligent mechanical gripper for high-throughput nucleic acid sample pipetting workstation
A nucleic acid sample, intelligent machine technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of fast and stable grasping and transfer difficulties of mechanical grippers, termination of experiments, and excessive gripping force, avoiding consumables. Deformation or grasping too loose consumables slipping phenomenon, to ensure the effect of experiment, light weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
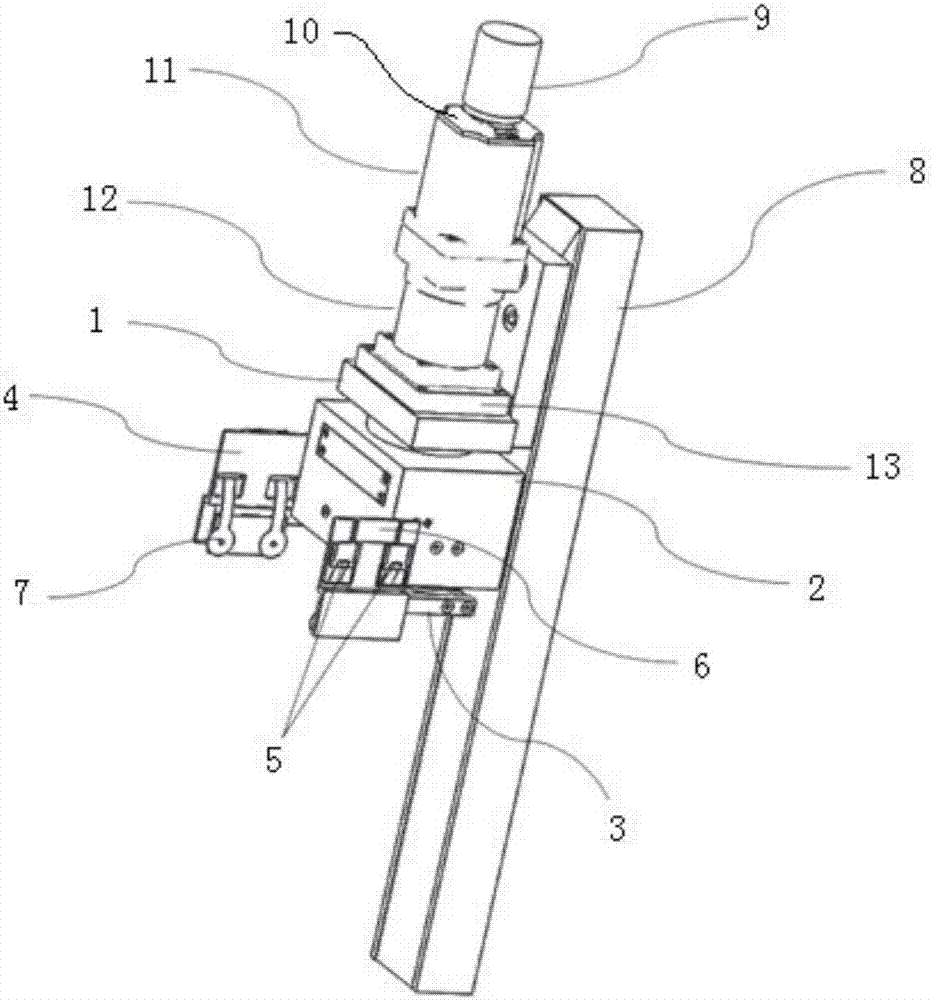
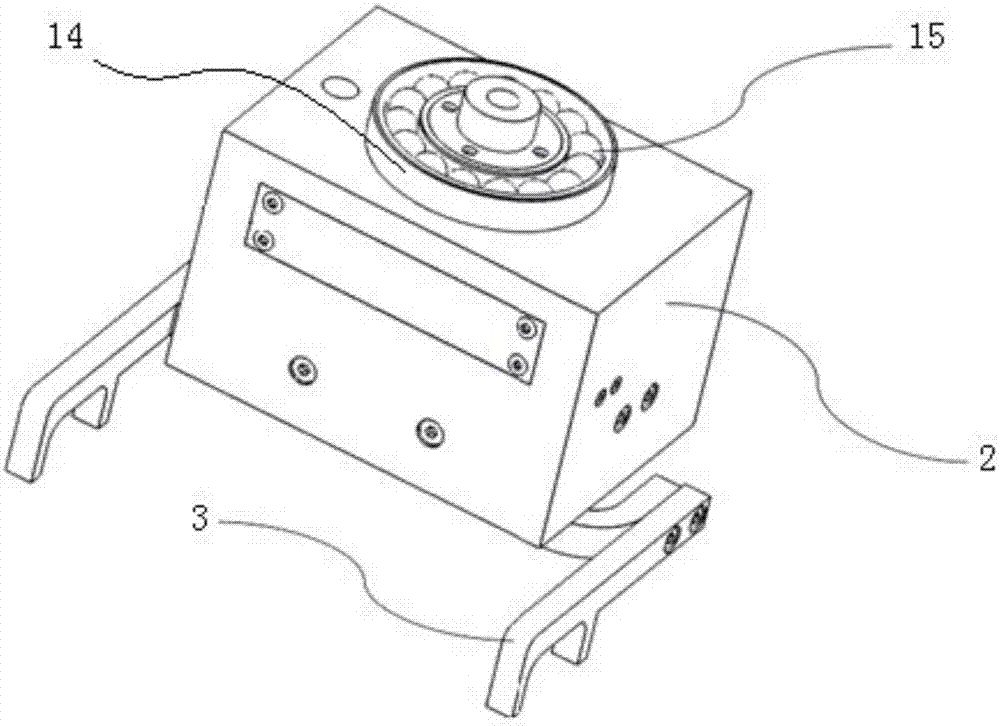
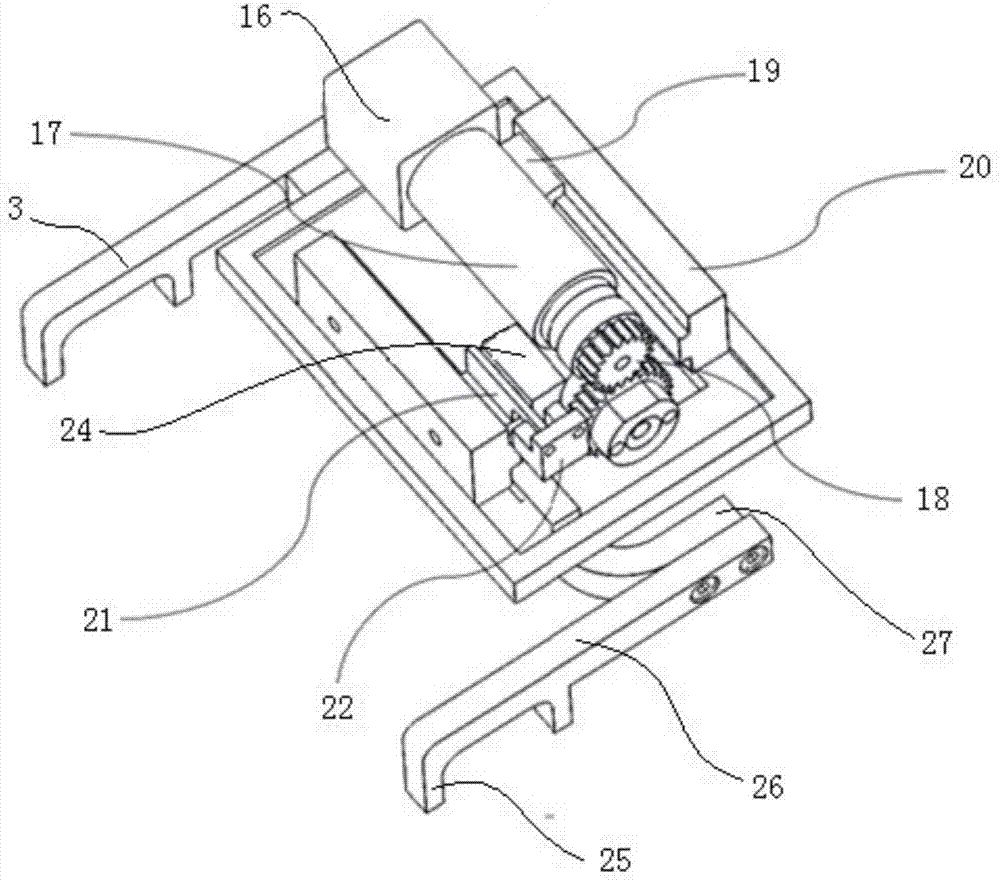
[0032] like Figure 1-6 As shown, a self-locking intelligent mechanical gripper for a high-throughput nucleic acid sample pipetting workstation includes a rotary positioning control assembly, a fixed plate 1, a gripper opening and closing control assembly, and a mechanical finger pressure collection control assembly; the rotating The positioning control component, the fixed plate 1 and the gripper opening and closing control component are connected sequentially from top to bottom, and the mechanical finger pressure acquisition control component is arranged on the gripper opening and closing control component; the gripper opening and closing control component includes a gripper cover 2. 28 stepping motor 16, first rotating connecting shaft 17, gear set 18, self-locking trapezoidal lead screw 23 of positive and negative rotating shaft, rotating shaft lead screw nut 24, slider 19, guide rail 20 and two gripper assemblies 3; One end of the 28 stepper motors 16 is fixedly connected...
Embodiment 2
[0035] It is basically the same as that of Embodiment 1, except that two gripper fingers 25 are provided at the front of each gripper arm 26, and an FSR pressure sensor 7 is provided on the mounting plate 4 corresponding to the position of each gripper finger 25 , the mounting plate 4 on the back of each FSR pressure sensor 7 is provided with an analog circuit 5, and the connection between the gripper finger 25 and the gripper arm 26 on the opposite side of the two gripper fingers 25 is a circular arc transition, which can imitate human fingers Grab the shape to match the force-sensitive characteristic curve of the FSR pressure sensor 7, which is similar to human touch, to ensure the accuracy of pressure collection.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More