

Self-assembly system and method for industrial robots
An industrial robot and assembly system technology, applied in the field of industrial robot manufacturing and intelligent application, can solve problems such as inability to ensure assembly consistency, inability to automatically assemble robots, damage, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The specific embodiment of the present invention will be further described below in conjunction with accompanying drawing:
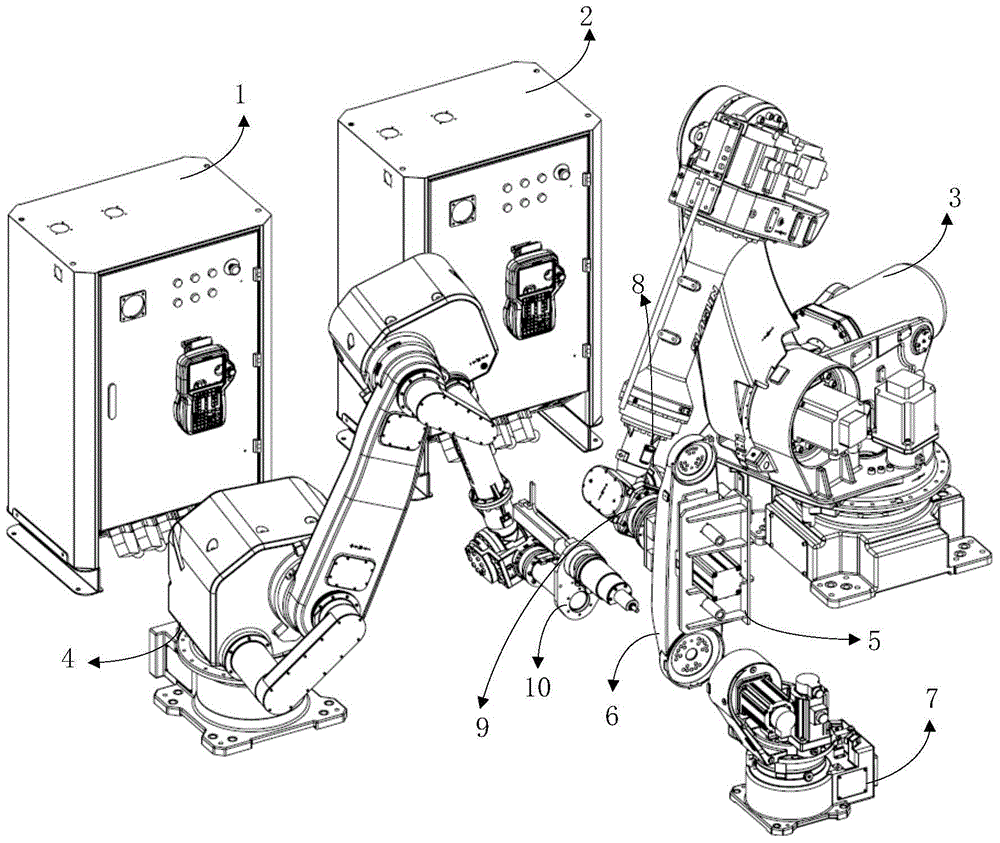
[0041] Such as figure 1 , 2 , 3, the industrial robot self-assembly system, including the mechanical part and the control part;
[0042]The mechanical part includes an assembly robot 3, a screwing robot 4, a clamping mechanism 5, a screwing device 10, and an assembly platform. The assembly robot 3, the screwing robot 4 and the assembly platform are fixed on the same reference plane, and the assembly robot 3 A clamping mechanism 5 is installed at the end, and a screwing device 10 is installed at the end of the screwing robot 4; when the system is working, the assembly part 6 is clamped by the clamping mechanism 5 on the assembly robot 3, and moves with the robot; The fixed position of the accessory 7 is in the working space of the assembly robot 3 and the screwing robot 4;
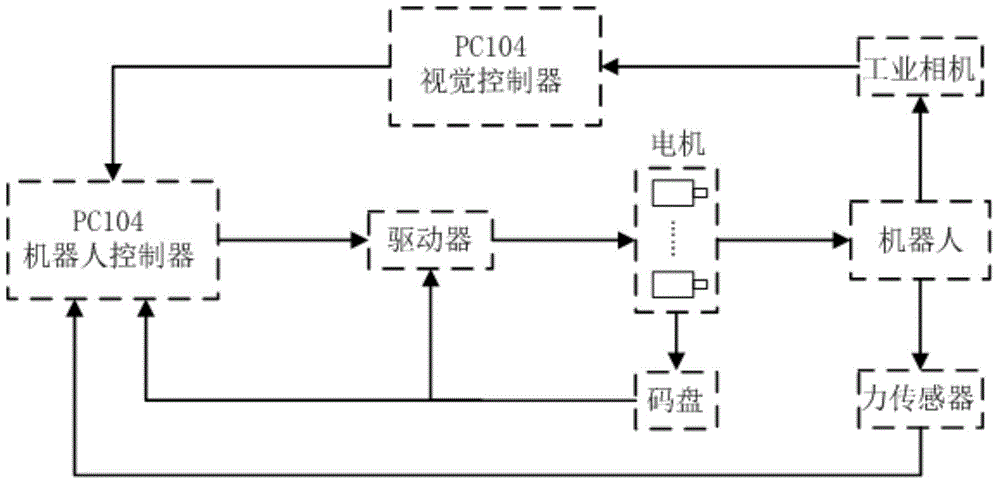
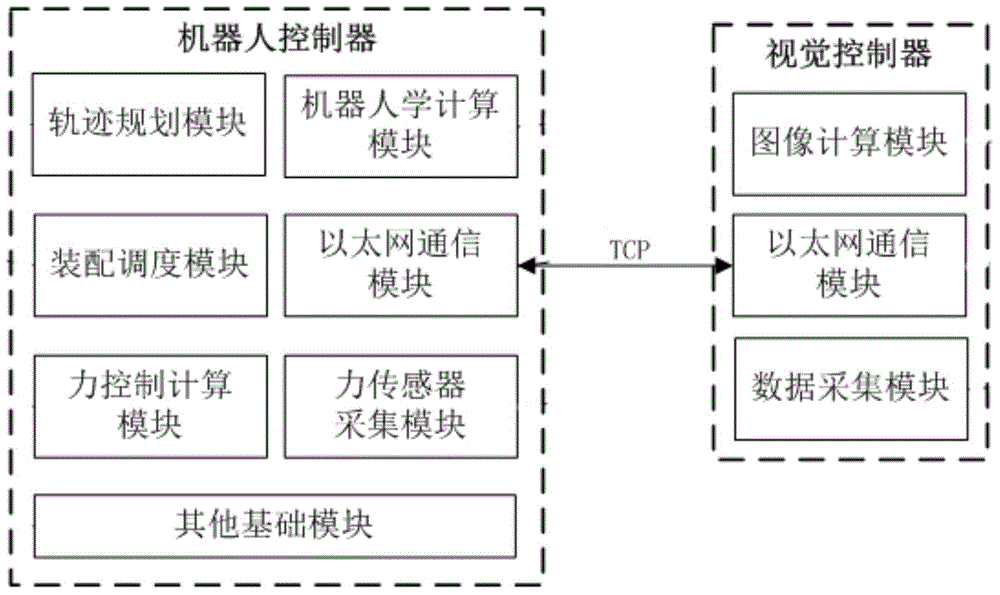
[0043] The control part includes a robot controller, a vision controlle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More