

Robustness self-adaption nonsingular terminal sliding-mode control method for train ATO system
A non-singular terminal, robust adaptive technology, applied in the field of robust adaptive non-singular terminal sliding mode control, to achieve the effect of eliminating singularity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] In order to illustrate the present invention more clearly, the present invention will be further described below in conjunction with preferred embodiments and accompanying drawings. Similar parts in the figures are denoted by the same reference numerals. Those skilled in the art should understand that the content specifically described below is illustrative rather than restrictive, and should not limit the protection scope of the present invention.
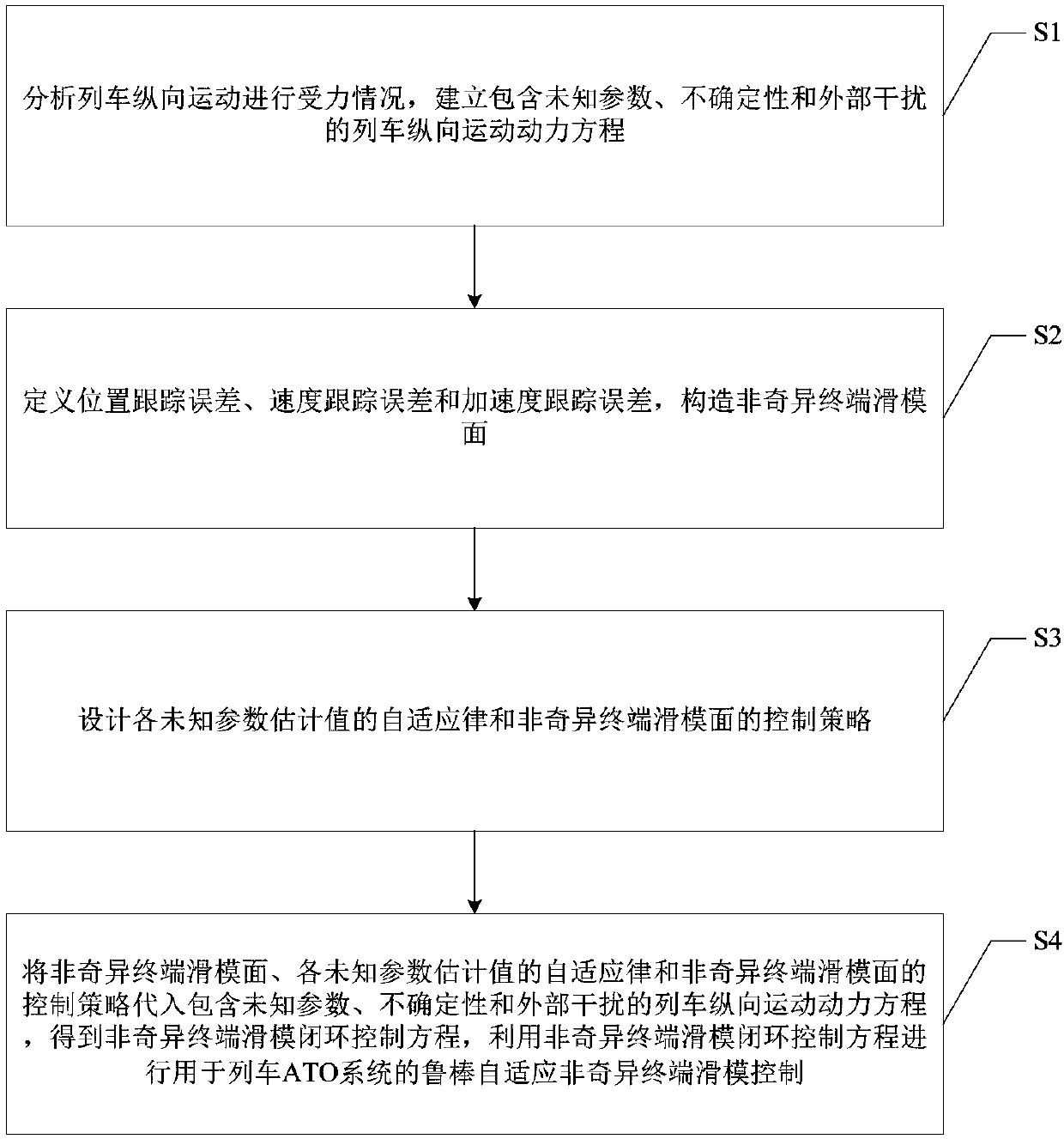
[0053] Such as figure 1 As shown, the robust adaptive non-singular terminal sliding mode control method for the train ATO system disclosed by the present invention comprises the following steps:
[0054] S1. Analyze the force situation of the longitudinal movement of the train, and establish the dynamic equation of the longitudinal movement of the train including unknown parameters, uncertainties and external disturbances;
[0055] S2. Define position tracking error, velocity tracking error and acceleration tracking error...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More