

Variable-rigidity pneumatic flexible mechanical hand capable of realizing equal-length movement
A variable stiffness, manipulator technology, applied in passive exercise equipment, medical science, diagnosis, etc., can solve the problems of single rehabilitation form, insufficient rehabilitation ability, and difficulty in meeting rehabilitation needs, and achieve improved quality of life, reduced burden, and light weight. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention is described in further detail below in conjunction with accompanying drawing:
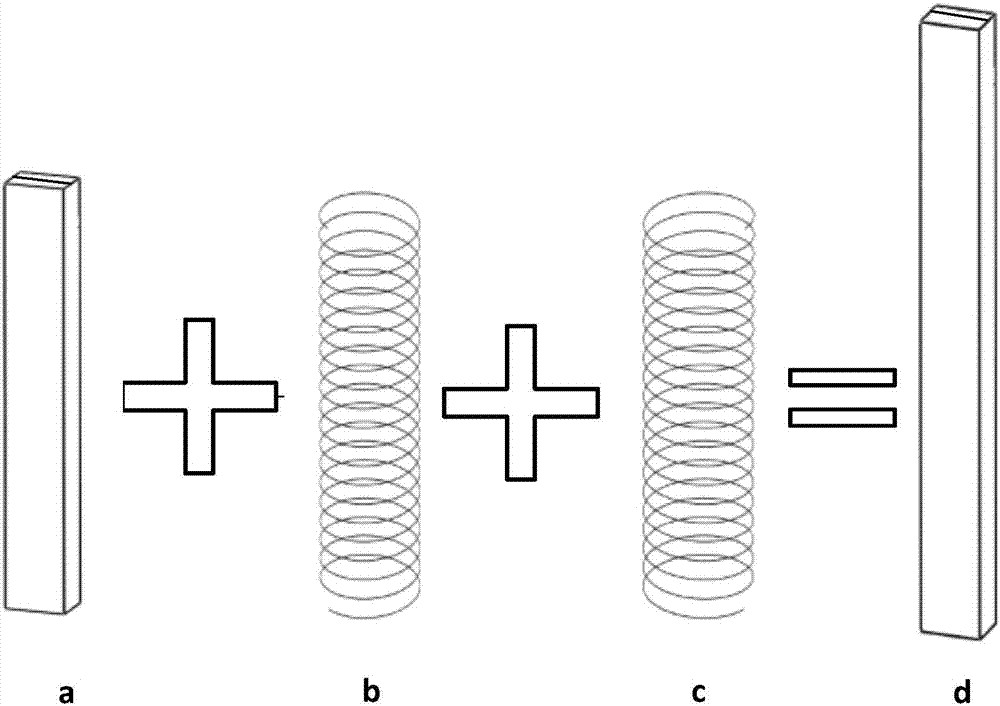
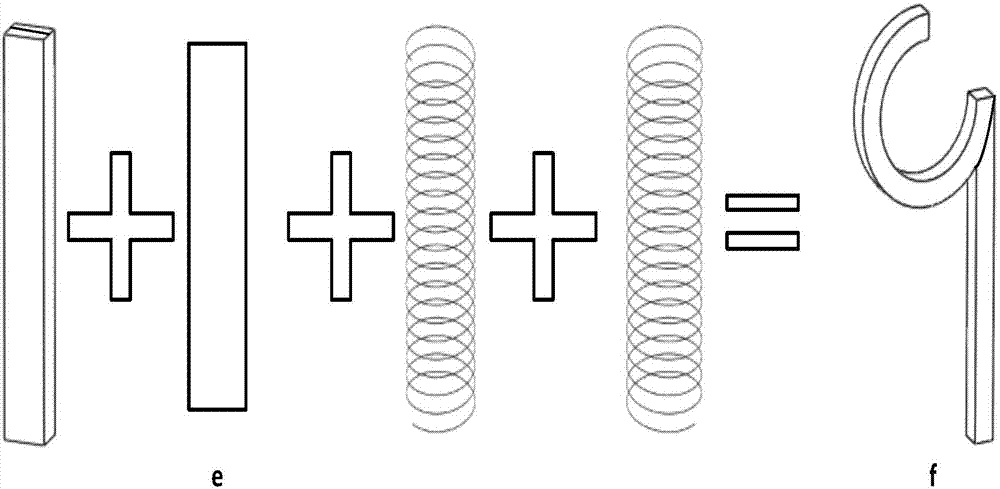
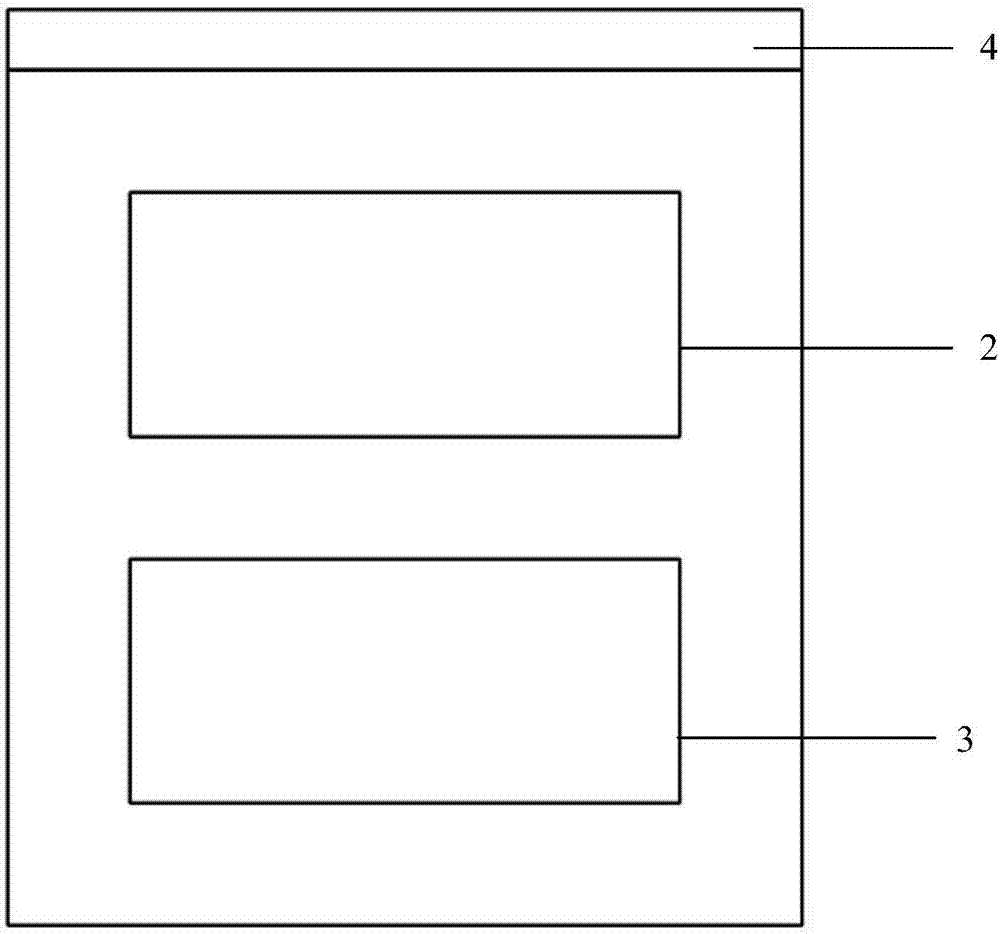
[0024] see Figure 1-5 , the variable stiffness pneumatic soft manipulator that can realize isometric motion in the present invention includes gloves that are convenient for the patient to wear, and five double-chamber soft fingers 1 pasted on the upper layer of the glove. The two independent cavities are respectively the power chamber and the variable stiffness chamber , the lower layer of the glove is worn on the user's hand, and each soft finger is connected to a portable drive device through a trachea to decode the collected patient's EEG signal, and control the solenoid valve and proportional valve to adjust the inflation and deflation speed of the air pressure to realize the control of the software. Finger control. The index finger, middle finger, ring finger and little finger of the software rehabilitation finger have a curved and elongated structure; the thumb...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More