

Three-dimensional transverse moving parallel robot mechanism
A technology of three-dimensional translation and robotics, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as complex kinematics solutions, strong kinematic coupling, and small work space, and achieve simplified trajectory planning, good transmission characteristics, The effect of a large working space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
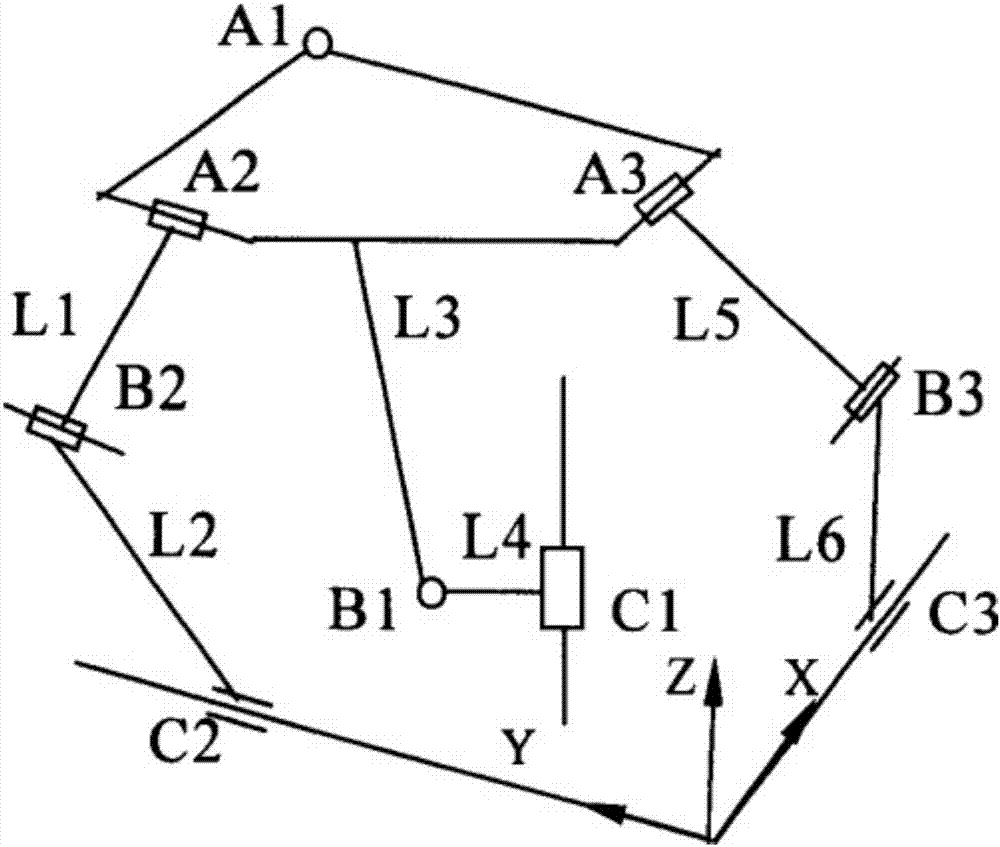
[0018] The mechanism of the present invention consists of a moving platform, a fixed platform and three branch chains connecting the above two platforms. The platform where A1, A2 and A3 are located is a moving platform. In the first branch chain, A1 and B1 are spherical pairs, C1 is a moving pair, and the axis of moving pair C1 is parallel to the Z axis; in the second branch chain, A2 and B2 are Rotating pair, C2 is a cylindrical pair; in the third branch, A3 and B3 are rotating pairs, and C3 is a cylindrical pair. The three branch chains are respectively connected to the fixed platform through k...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More