

Three-dimensional transformational parallel robot mechanism with large workspace
A three-dimensional moving and working space technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of complex kinematics positive solution, strong motion coupling, small working space, etc., to achieve simplified trajectory planning, good transmission characteristics, The effect of a large workspace
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
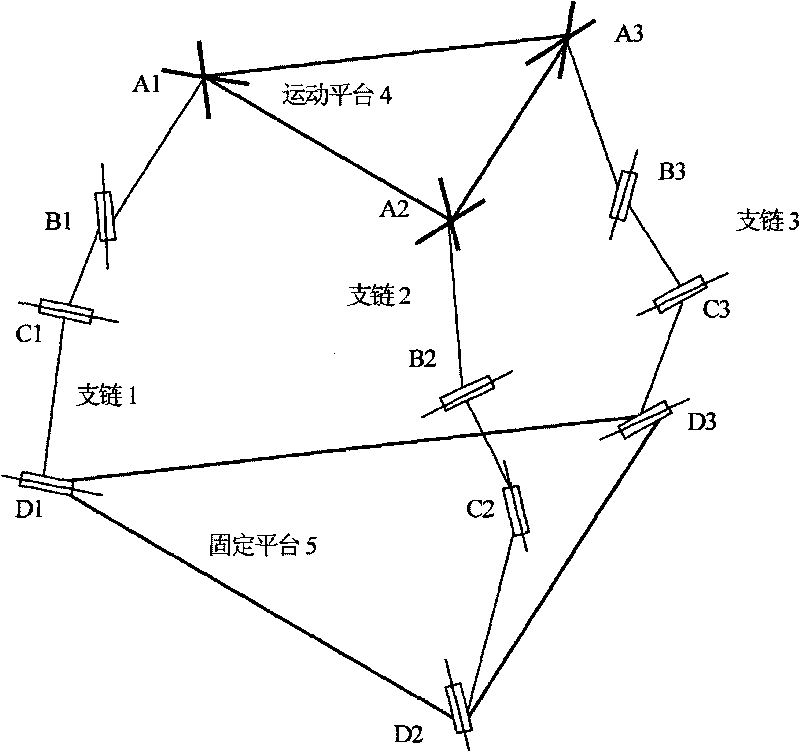
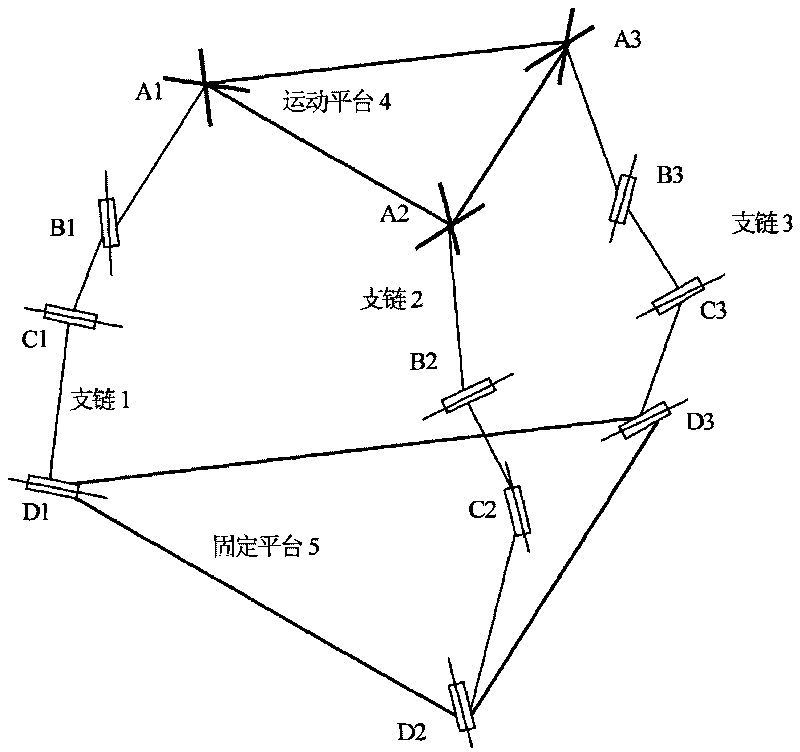
[0018] The large working space three-dimensional mobile parallel robot mechanism of the present invention is composed of a moving platform 3, a fixed platform 4 and three branch chains with the same structure connecting the above two platforms. Each branch chain consists of three revolving pairs and a Hooke hinge. The first rotating pair (D1, D2, D3) connected to the fixed platform is the driving pair, the axes of the second rotating pair (C1, C2, C3) adjacent to the driving pair are respectively parallel to the axis of the driving pair, and the third rotating pair ( B1, B2, B3) axes are perpendicular to the axes of the first two revolving pairs. The axis of one axis of the Hooke hinge (A1, A2, A3) connected to the motion platform is parallel to the axis of the driving pair, and the axis of the other axis of the Hooke hinge is parallel to the axis of the third rotating pair. The axes on the moving platform 4 and the fixed platform 5 are all on the same plane of the platform, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More