

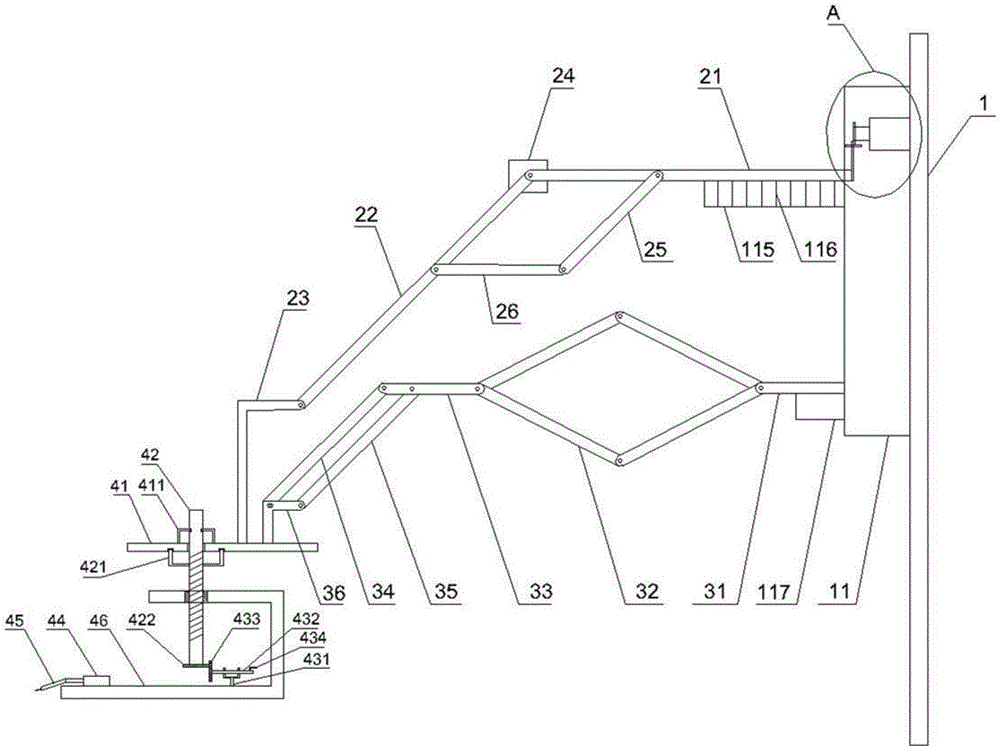
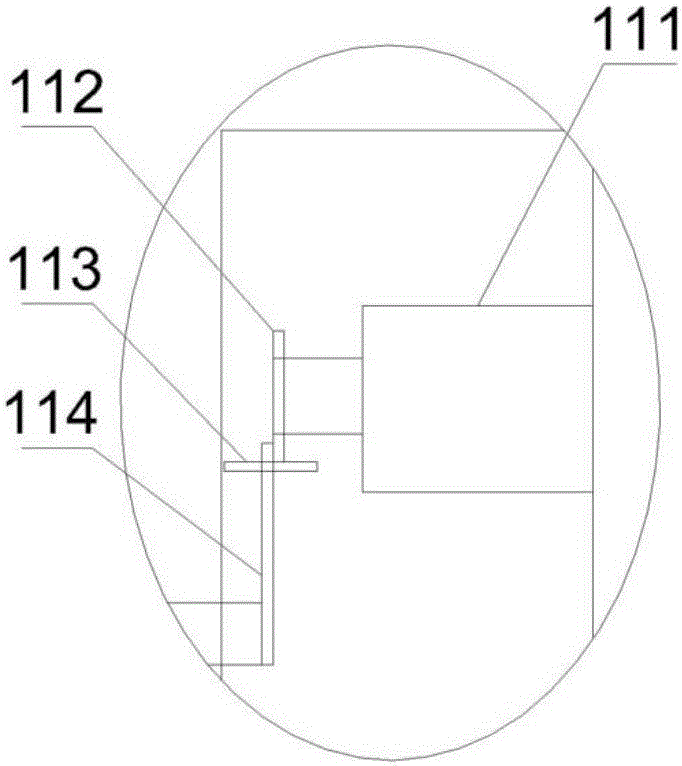
Lead screw type mechanical arm of robot for welding
A technology of robot and mechanical arm, which is applied in the field of screw-type welding robot manipulator, can solve the problems of poor starting performance, low overall efficiency, and large influence of hydraulic oil temperature, so as to improve stability and fluency, facilitate welding, The effect of convenient remote monitoring and manipulation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described in detail below in conjunction with the accompanying drawings, so that those skilled in the art can implement it with reference to the description.
[0026] It should be understood that terms such as "having", "comprising" and "including" as used herein do not entail the presence or addition of one or more other elements or combinations thereof.
[0027] In the description of the present invention, it should be noted that unless otherwise specified and limited, the terms "installation", "connection" and "setting" should be understood in a broad sense, for example, it can be fixedly connected, set, or Removably attached, set, or integrally attached, set. Those of ordinary skill in the art can understand the specific meanings of the above terms in the present invention in specific situations. The terms "landscape", "portrait", "top", "bottom", "front", "rear", "left", "right", "vertical", "horizontal", "top", "bottom", The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More