Modularized variable-rigidity joint mechanism of S-shaped robot
A snake-like robot and variable stiffness technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of collision damage, poor flexibility, insufficient adaptability, etc., and achieve the effect of reducing damage, preventing damage, and controlling methods quickly.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The following figures will further illustrate the present invention in conjunction with the accompanying drawings.
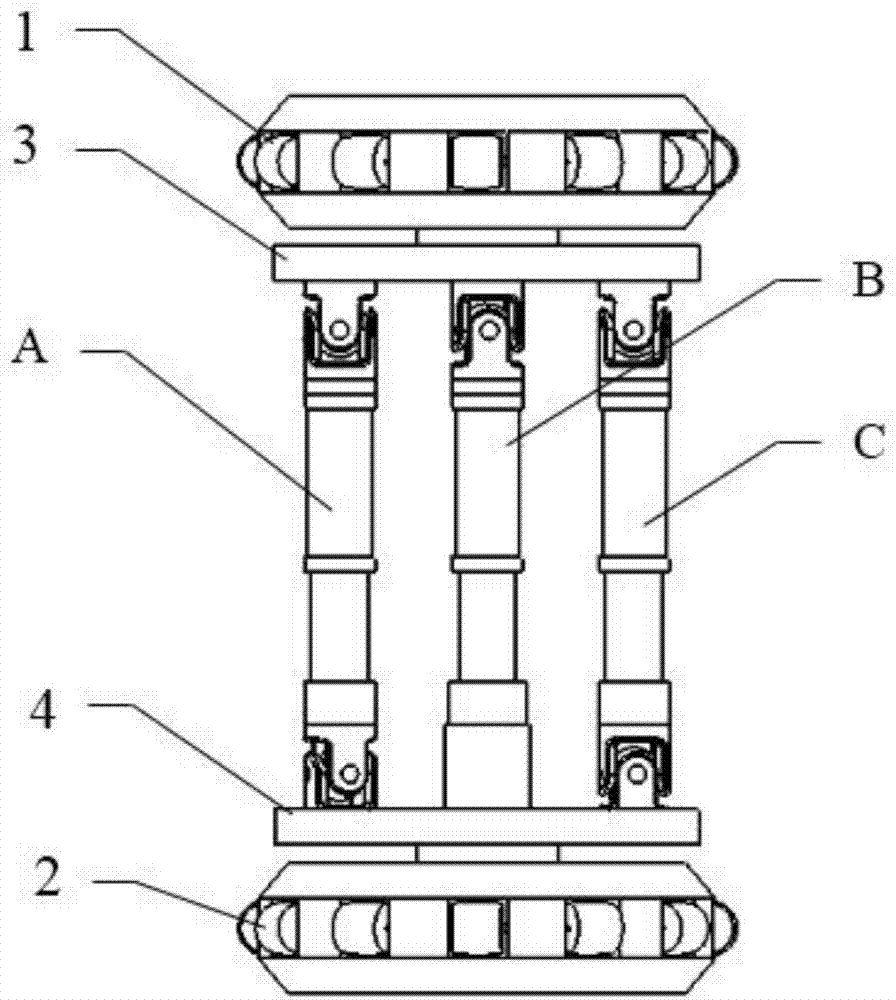
[0033] see figure 1 , The variable stiffness joint mechanism of the snake-shaped robot provided by the present invention includes an upper omnidirectional wheel 1, a lower omnidirectional wheel 2, an upper platform 3, a lower platform 4 and variable stiffness branch chains A, B, and C. The upper omni-directional wheel and the lower omni-directional wheel are respectively connected with the upper platform and the lower platform, and the upper platform and the lower platform are connected together by three variable stiffness branch chains.
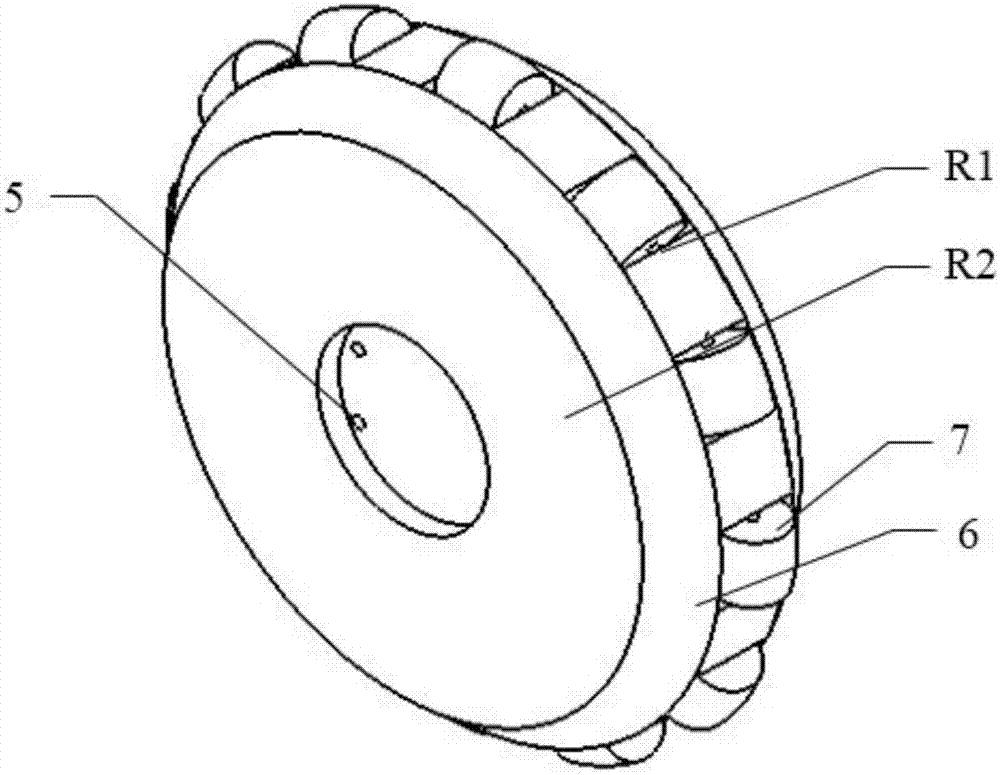
[0034] see figure 2 , the omnidirectional wheel is composed of a wheel frame 6 and 12 driven wheels 7, and the first rotating pair R1 on the driven wheel is connected with the wheel frame. The omnidirectional wheel is rotated by the second rotating pair R2 to realize the rolling of the joint. As the joint deflects, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com