

Working-grade underwater robot
An underwater robot and operation-level technology, applied to underwater ships, underwater operating equipment, motor vehicles, etc., can solve the problems of large working noise, complicated equipment operation, low load, etc., and achieve low underwater biological interference and buoyancy The effect of high control precision and rapid response
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
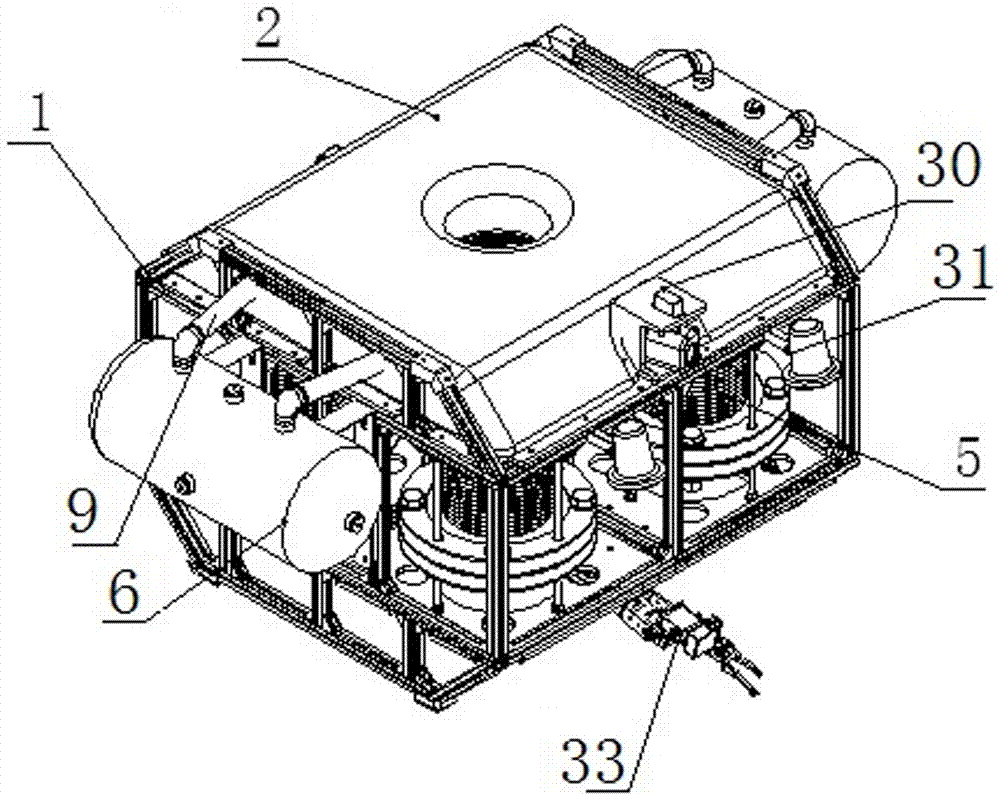
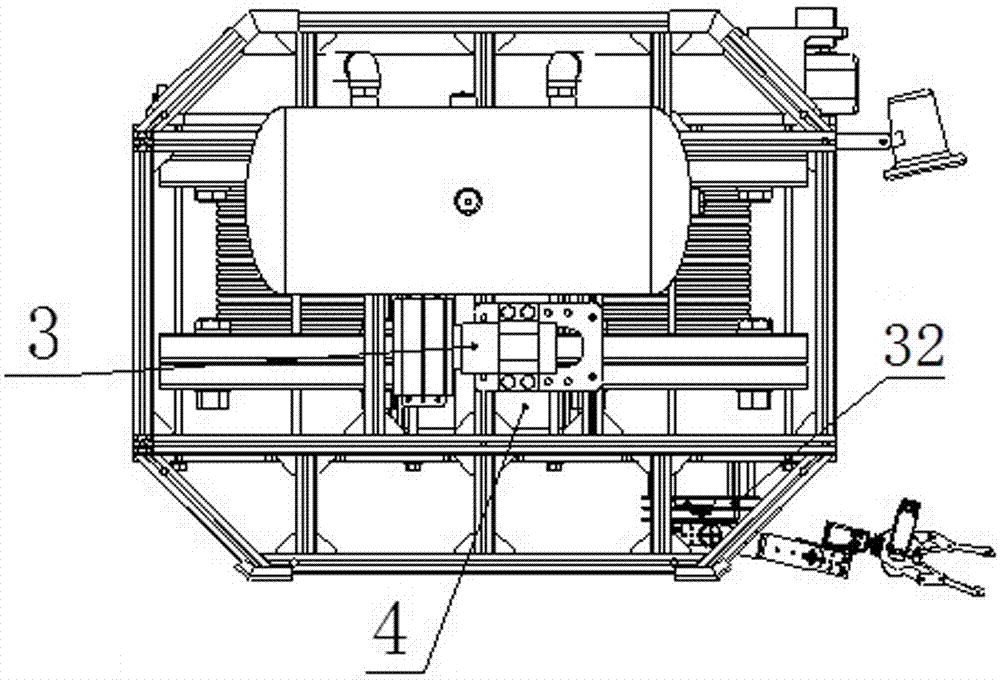
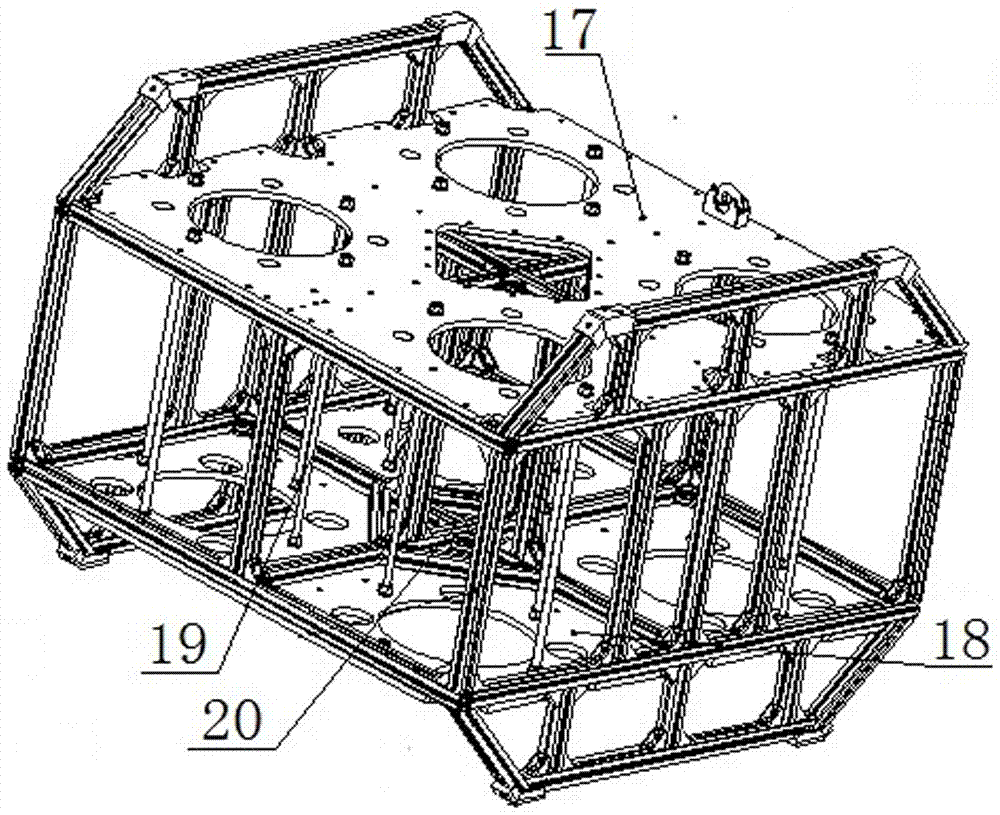
[0030] Such as figure 1 — Figure 11 As shown, a work-level underwater robot is connected to the host computer through an umbilical cable. The robot is provided with a frame 1, a floating body 2 is fixed on the frame 1, and a buffer tank 6 is provided on both sides of the frame 1. 3, a number of balance assemblies 5 and control systems 4 are arranged in the frame 1, the balance assembly 5 includes a bellows balancer 7, a drive mechanism 8 is provided in the bellows balancer 7, and the frame 1 is also provided with detection device. The buffer tank 6 communicates with the bellows balancer 7 through the gas buffer conduit 9 , the drive mechanism 8 of the propeller 3 and the bellows balancer 7 is electrically connected with the control system 4 through the cable duct 9 , and the detection device is electrically connected with the control system 4 .
[0031]When the robot is working underwater, the upper computer controls the robot's control system 4 through the umbilical cable ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More