

Robot scheduling system and method, electronic device, and storage medium
A scheduling system and scheduling method technology, applied in control/regulation systems, general control systems, instruments, etc., can solve the problems of lack of flexibility and scalability, increase the workload of staff, unfavorable production, etc., to reduce the workload , flexible access, and easy unified management
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
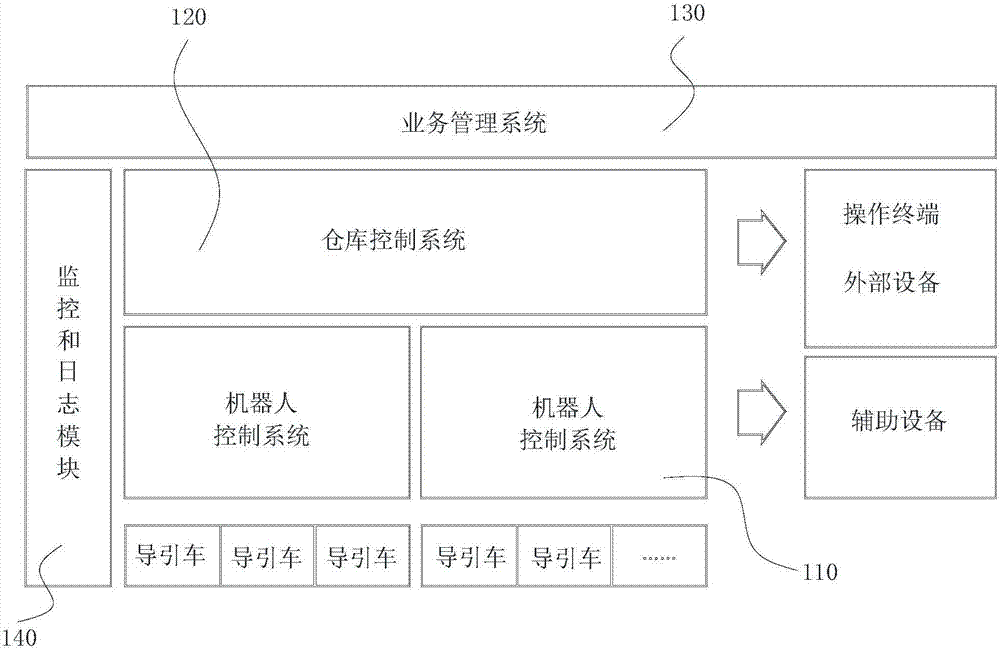
[0047] The robot scheduling system is a scheduling management platform that can connect multiple mobile robots and connect with upper-level business systems, such as MES, WMS, etc., to guide multiple mobile robots to complete specific tasks. The guided vehicle can be an intelligent mobile robot iagv, a two-dimensional code navigation agv, a laser navigation agv, a visual navigation agv and other sports equipment with autonomous navigation functions.
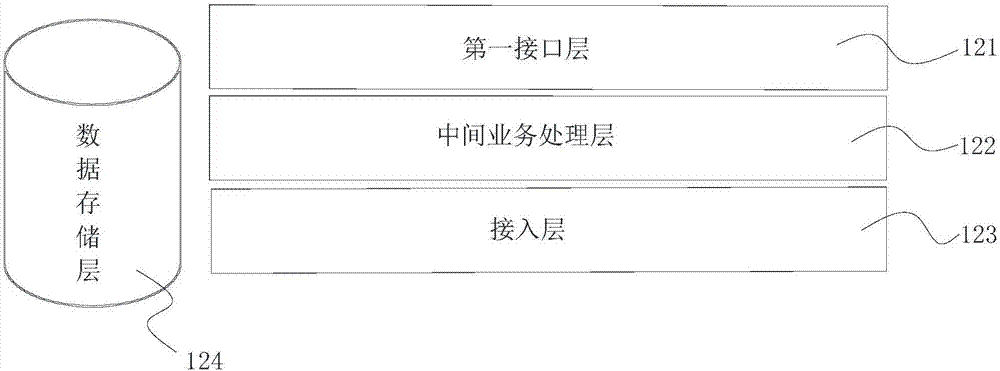
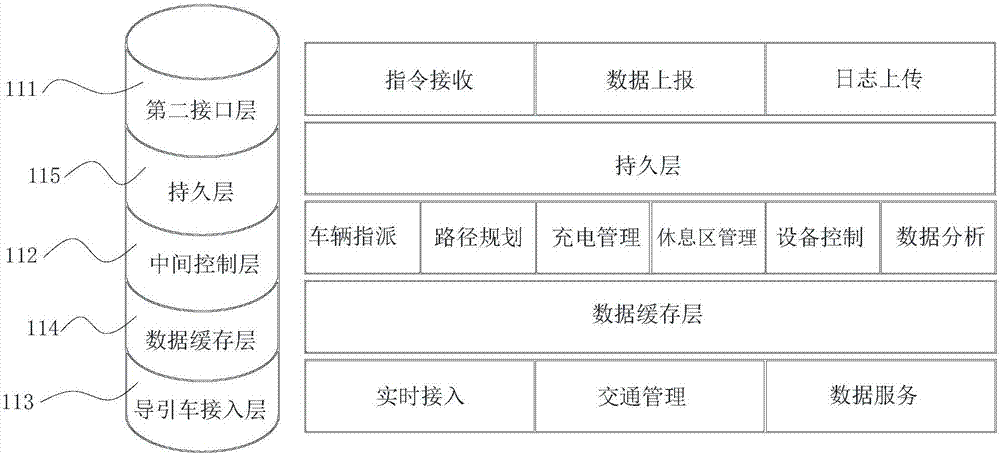
[0048] Such as figure 1 It is a robot dispatching system, including a robot control system 110 (RCS, Robot Control System) and an intermediate control system 120 (WCS, Warehouse Control System); the intermediate control system 120 is used to process business data in warehouses, workshops, etc., and can be used as An intermediate layer between the robot control system 110 and the business management system 130 .
[0049] The robot control system 110 is used to obtain robot management information for controlling the robot to compl...
Embodiment 2
[0071] Such as Figure 5 The robot scheduling method shown includes the following steps:
[0072] Step S110, obtaining the task package from the business management system. Specifically, the intermediate control system obtains task packages, such as order information, from the business management system.
[0073] Step S120, generating robot management information according to the acquired tasks. Specifically, the intermediate business processing layer processes the tasks obtained from the business management system to split different robot management information.
[0074] Step S130, dispatching the robot management information to a robot control system associated with the robot management information. Specifically, the intermediate control system sends the robot management information to the corresponding robot control system.
[0075] Step S140, the robot control system is used to generate a task instruction according to the robot management information, and send the task...
Embodiment 3
[0085] Such as Figure 6 An electronic device shown includes a memory 200, a processor 300, and a program stored in the memory 200, the program is configured to be executed by the processor 300, and the processor 300 implements the steps of the above-mentioned robot scheduling method when executing the program .
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More