

AGV vehicle laser navigation system based on ROS
A laser navigation and car technology, applied in control/adjustment systems, two-dimensional position/channel control, motor vehicles, etc., can solve problems such as application scenario limitations, and achieve the goal of speeding up the development process, avoiding dangerous situations, and reducing the difficulty of development. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
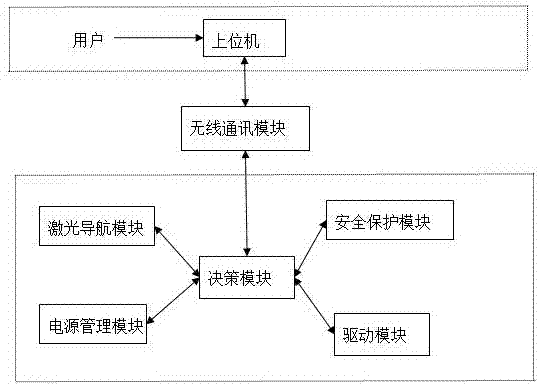
[0016] see figure 1 A ROS-based AGV car laser navigation system shown includes an upper computer and a lower computer installed in the AGV car, and a wireless communication module is installed in the upper computer and the lower computer, and the user communicates with the AGV car through the upper computer. The lower computer sends instructions, and at the same time monitors the position, status and voltage status of the AGV car. When an emergency occurs, the user can intervene in the lower computer system of the AGV car through the upper computer to avoid dangerous accidents;
[0017] In the present embodiment, the upper computer is a PC tablet computer, the display has a touch screen function, and the operating system is windows system and RO...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More