

Horizontal multi-joint SCARA (Selective Compliance Assembly Robot Arm) type collaborative robot
A horizontal multi-joint, robot technology, applied in the field of robots, can solve the problems of robot damage, mass eccentricity, and increase the speed of the robot, and achieve the effects of improving the integrity of the line, reducing the motion inertia, and improving the sensing accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
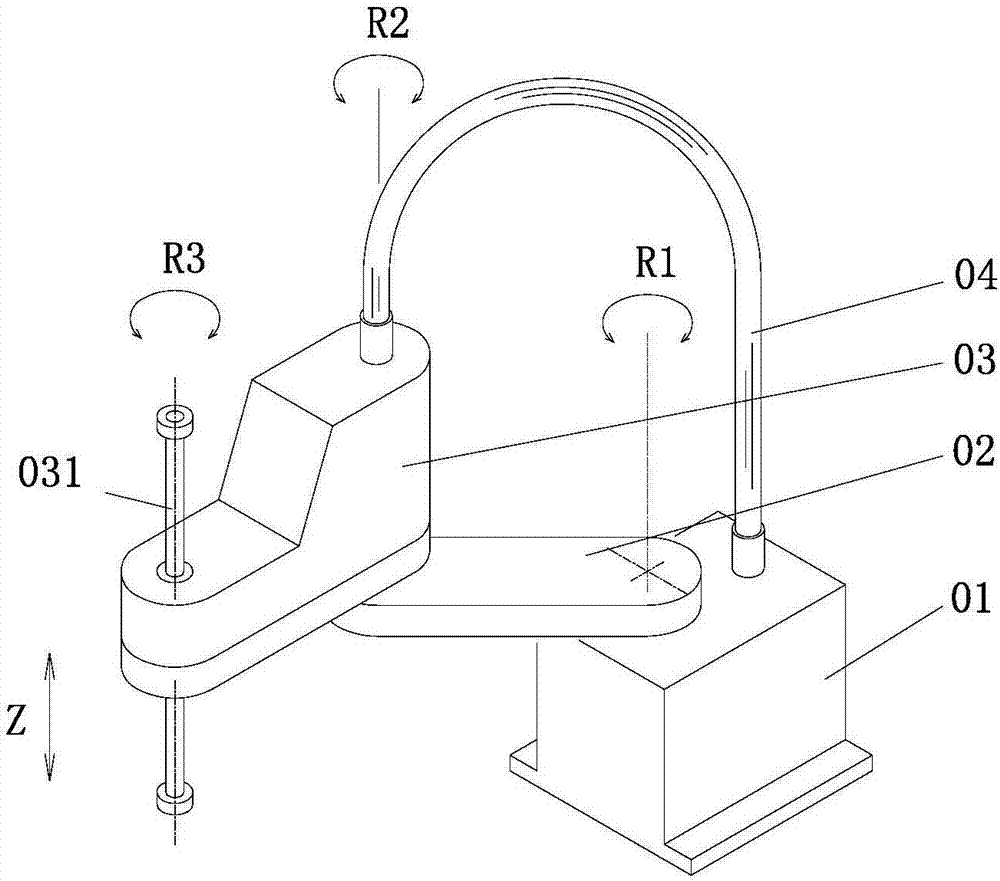
[0055] Such as Figure 4 and Figure 5 As shown, a horizontal multi-joint SCARA collaborative robot provided by the present invention includes a base 1, a main arm 2, a head 3 and a main shaft 4 arranged on the head,
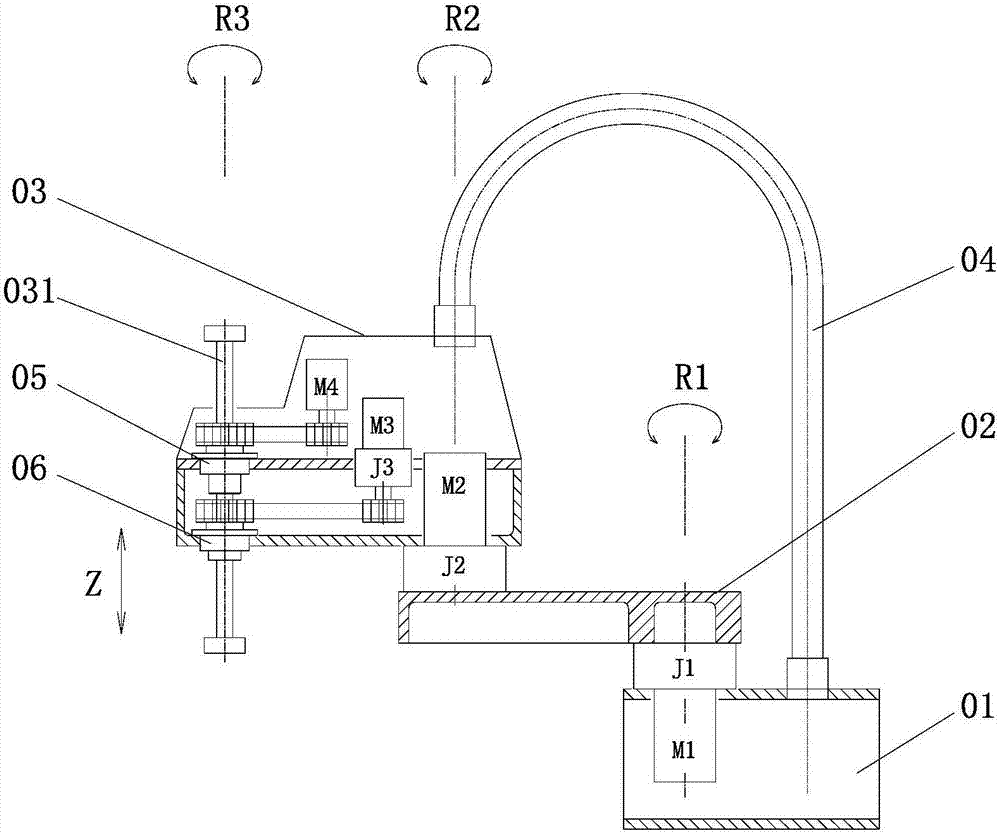
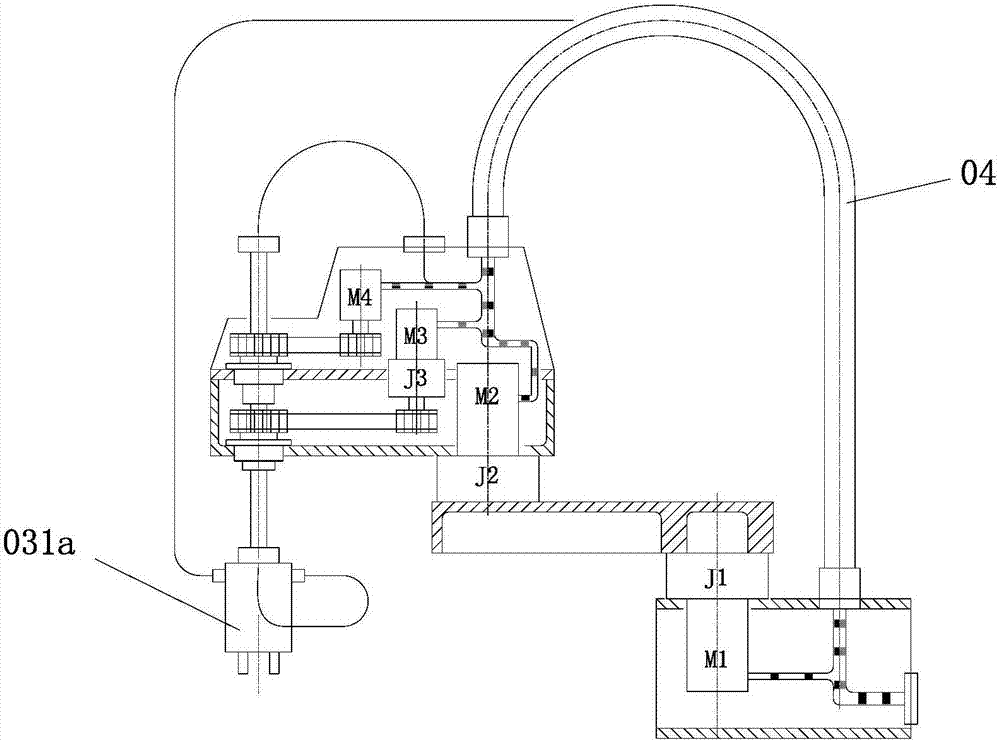
[0056] Such as Figure 5 , Figure 7 and Figure 8 As shown, the base 1 has a base shell 11 , and a base is arranged on the lower surface of the base shell 11 . The main arm driving motor M1 and the head driving motor M2 are arranged in the base housing 11 . The base 1 is in a reverse C shape, and a recess 12 is formed on one side of the base 1 (see Figure 4 ), one end of the main arm 2 is disposed in the recessed portion 12 .
[0057] In the base housing 11, a layer of partition 111 is provided on the back of the corresponding recess 12 at a height corresponding to the upper shell wall of the recess 12, and a layer of partition 112 is provided at a height corresponding to the lower shell wall of the recess 12. . The main arm drive motor M1 is arranged ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More