

Robot wrist driving mechanism
A driving mechanism and robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of large overall structure, large differences, poor simulation, etc., and achieve the effect of improving position accuracy, low cost, and small size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention is described in further detail now in conjunction with accompanying drawing. These drawings are all simplified schematic diagrams, which only illustrate the basic structure of the present invention in a schematic manner, so they only show the configurations related to the present invention.
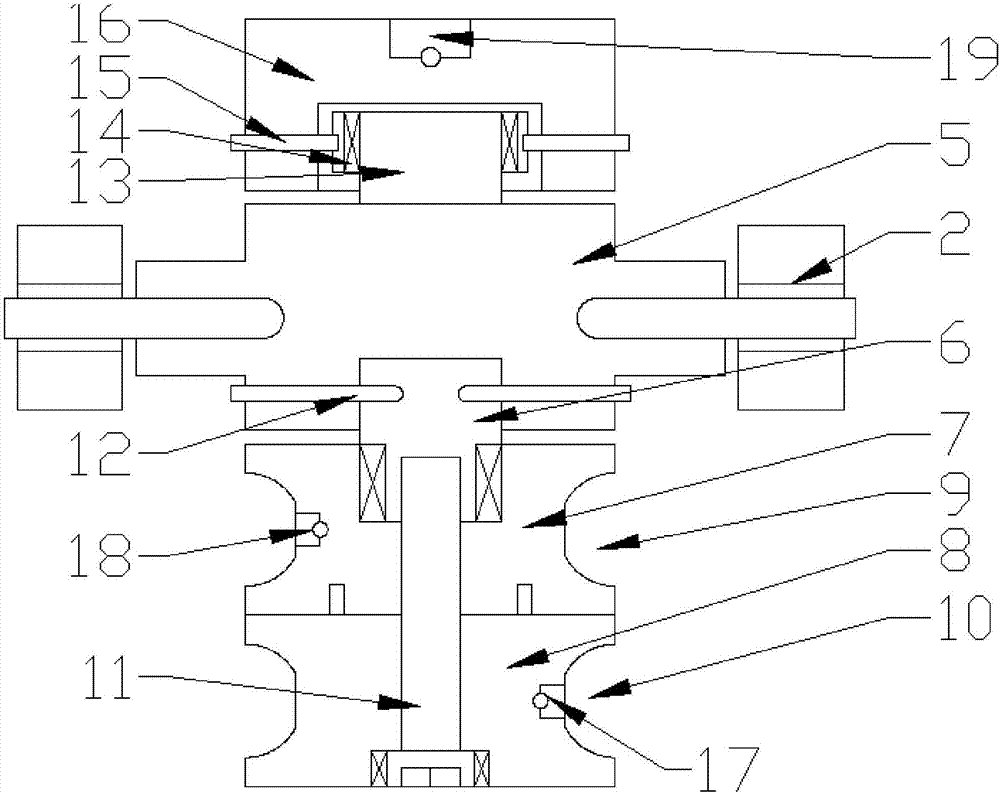
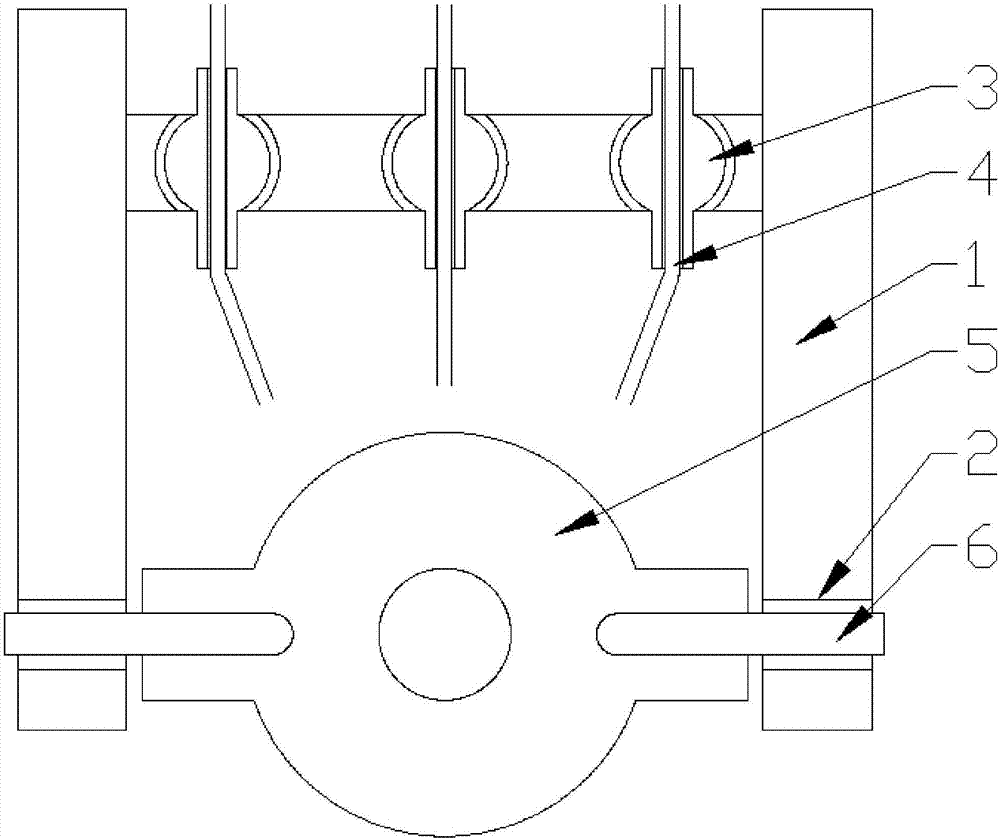
[0019] Such as figure 1 and figure 2 As shown, the present invention is a robot wrist drive mechanism, including an X-axis rotation mechanism, a Y-axis rotation mechanism and an arm connection seat, wherein the arm connection seat is a symmetrical structure, and two groups of X-axis rotation bearing holes are arranged at the end; An X-axis rotation base is provided between the X-axis rotation bearing holes, and both ends of the X-axis rotation base are connected to the X-axis rotation bearing holes through the rotation axis A. One end of the X-axis rotation base An X-axis drive block is rotatably connected to the upper part, and an X-axis drive cable is fix...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More