

Damping crawler type unmanned mobile platform
A mobile platform and crawler-type technology, applied in the field of robotics, can solve the problems of high energy consumption, increase the degree of freedom of the mechanism and the complexity of the overall structure, increase the weight, etc., and achieve the effect of high space utilization, compact structure and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will be described in further detail below in conjunction with the accompanying drawings.
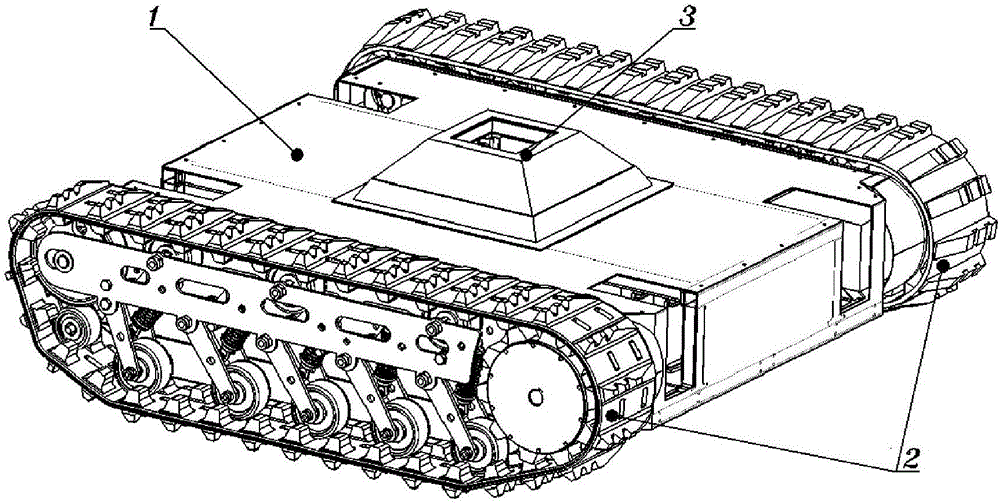
[0016] combine figure 1 , a shock-absorbing crawler-type unmanned mobile platform, including a car body 1, a module carrying platform 3 and two sets of track wheel mechanisms 2, the module carrying platform 3 is set at the center of the top surface of the car body 1, and the module carrying platform 3 is reserved for Module installation position. Two sets of track wheel mechanisms 2 are arranged symmetrically on the left and right sides of the vehicle body 1 .
[0017] The present invention uses the module loading platform 3 to carry out different modules, such as manipulators, forts, etc., according to the needs of tasks. The track wheel mechanism 2 has considerable off-road and obstacle-crossing functions, ensuring the passability and adaptability of the unmanned mobile platform in complex environments. It can also walk smoothly without bumps, and then e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More