

Control method for state compensation model during batch processing
A technology of model control and state control, applied in the field of automation, to achieve the effect of improving control performance and overall performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0067] Take the batch injection molding process as an example: the batch injection molding process is a typical periodic process, and the product quality of the injection molding process is guaranteed by controlling the set value of the holding pressure stage.
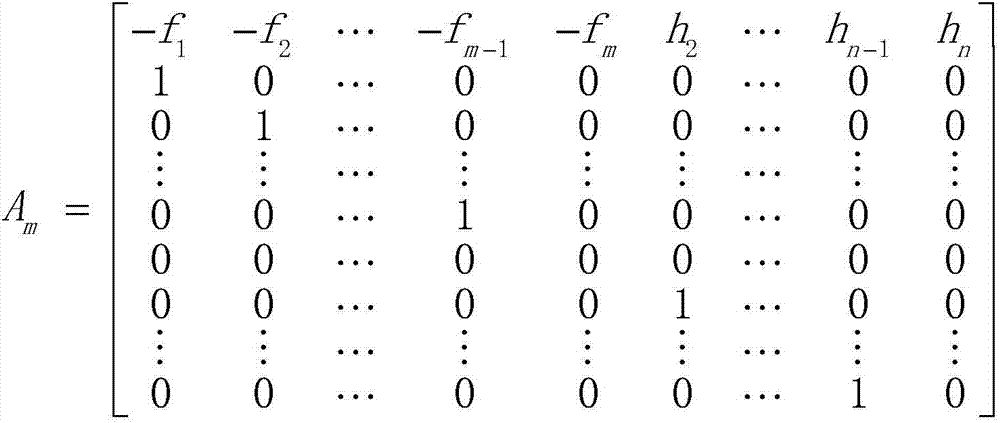
[0068] Step 1. Establish a new state control model for the batch injection molding process, the specific steps are
[0069] 1.1 Assume that the simplified single-input single-output system model of the batch injection molding process is
[0070] F(q t -1 )y(t,k)=H(q t -1 )u(t,k)
[0071] Add the time backward difference operator Δ to the above control system t , the system equation becomes
[0072] F(q t -1 )Δ t y(t,k)=H(q t -1 )Δ t u(t,k)
[0073] In the formula, y(t,k) and u(t,k) are the holding pressure and valve opening at time t of the kth cycle. q t -1 is the backward shift operator per unit time, F(q t -1 ), H(q t -1 ) of the form:
[0074] F(q t -1 )=1+f 1 q t -1 +f 2 q t -2 +…+f m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More