

Guide wire controller for interventional surgery robot and control method thereof
A technology of interventional surgery and robotics, applied in the field of minimally invasive vascular interventional surgery, can solve the problems of inconvenient clamping and complicated guide wire clamping structure, and achieve the effects of easy replacement and disinfection, simple combination, and convenient disassembly and assembly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
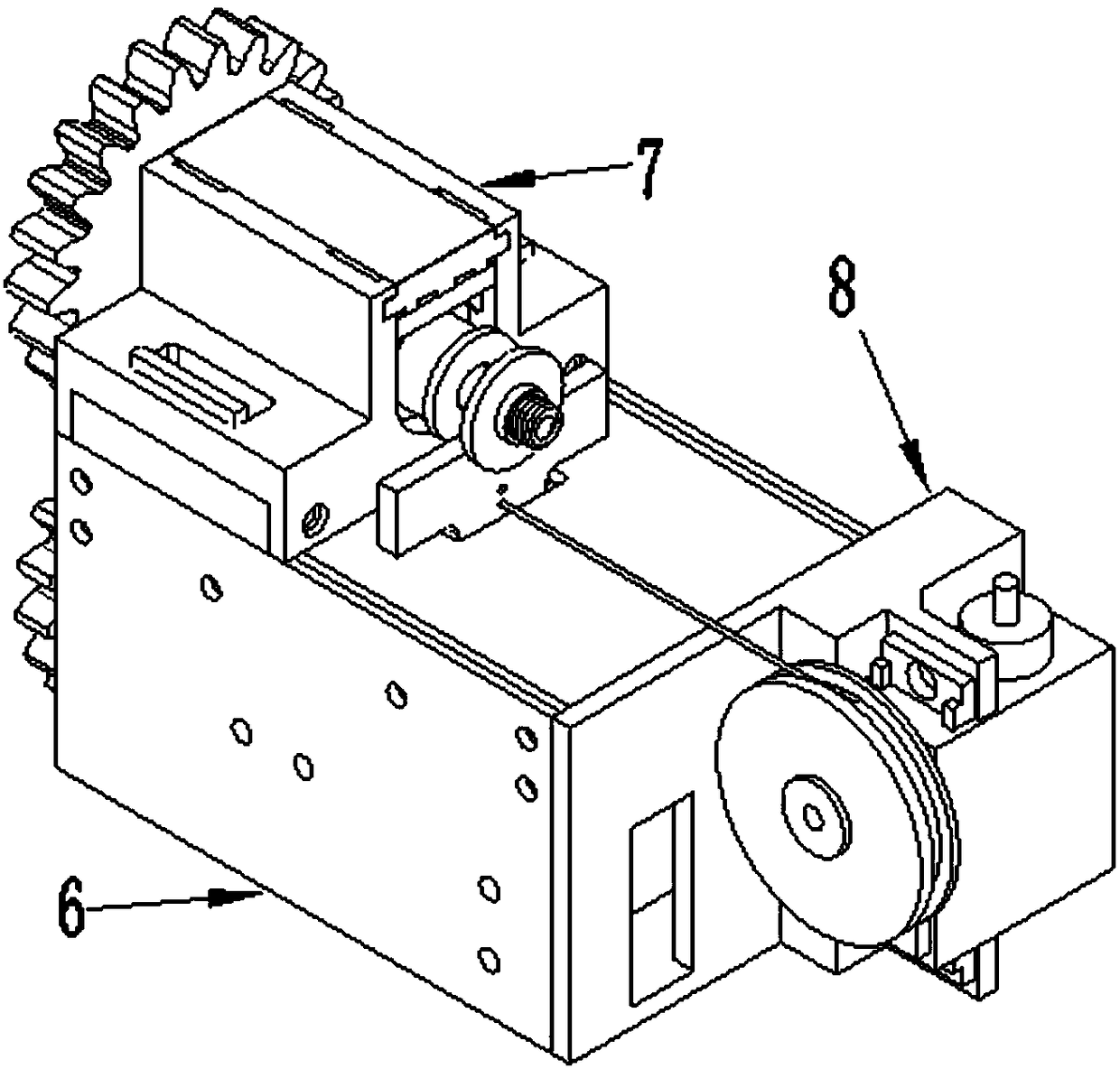
[0057] Such as figure 1 As shown, a guide wire controller for an interventional surgery robot in this embodiment mainly includes five parts, namely a base part 6, a guide wire clamping mechanism 7, a clamping switching mechanism 8, a guide wire twisting assembly 630 and Force measuring assembly 9; wherein, the base part 6 is the installation basis of the other four parts, the guide wire clamping mechanism 7 and the clamping switching mechanism 8 can be detachably installed on the base part 6, and the guide wire clamping mechanism 7 is located in the base part 6, the clamping switching mechanism 8 is located at the rear side of the base part 6, the guide wire clamping mechanism 7 is used to clamp the guide wire, and the clamping switching mechanism 8 is used to drive the guide wire clamping mechanism 7 to loosen the guide wire The clamping of the guide wire, while the guide wire twisting assembly 630 is used to complete the twisting operation on the guide wire, and the force me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More