

Hexapod robot obstacle avoidance method based on fuzzy Q learning
A hexapod robot and robot technology, applied in two-dimensional position/channel control and other directions, can solve the problem that obstacle avoidance algorithms cannot be applied to hexapod robots, and achieve the effect of ensuring accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
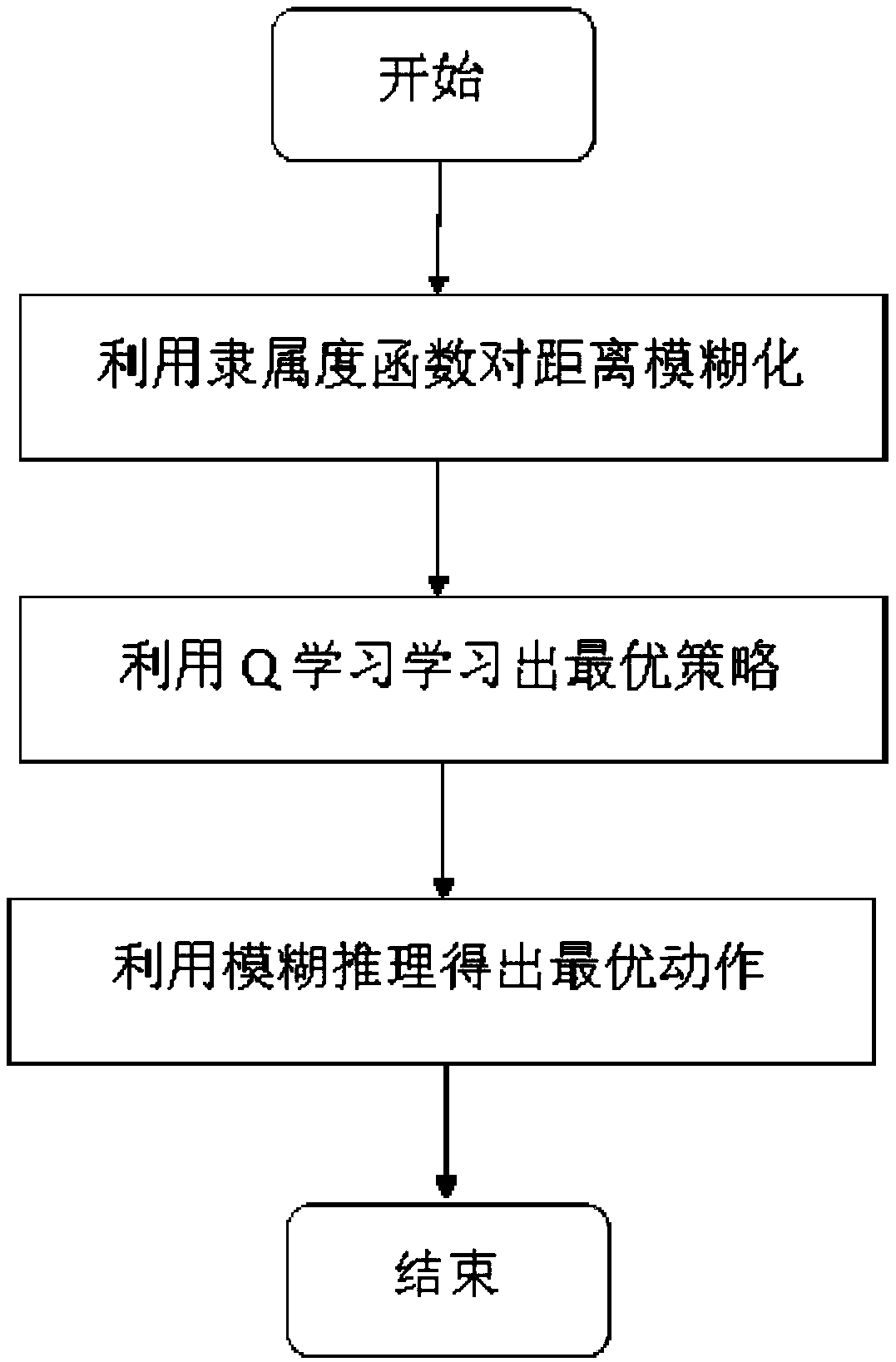
[0030] The fuzzy Q-learning-based hexapod robot obstacle avoidance method disclosed in the present invention is a fuzzy Q-learning-based hexapod robot obstacle avoidance system, which includes a distance measurement system, a fuzzy control system and a hexapod robot motion system.
[0031] Among them, the distance measurement system is mainly composed of 9 ultrasonic sensors installed in front of the hexapod robot; the fuzzy control system is mainly composed of modules such as membership function and fuzzy reasoning; the motion system of the hexapod robot is mainly composed of the CR-6 robot model and the main control system. device composition.
[0032] When the system is working, firstly, the obstacle information of the hexapod robot is obtained with the help of ultrasonic sensors, and the measurement results are fuzzified by the distance membership function, and the obstacle information is converted into a limited state set; then the hexapod is built in Matlab software. The...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More