

A non-magnetic sensor
A magnetic sensor and inductance technology, applied in the field of meter measurement, can solve the problems of mutual coupling, interference, affecting the realization of non-magnetic sensing function and the accuracy of measurement, and the lack of sufficient space distance for the LC oscillator circuit. The effect of improving accuracy and reducing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
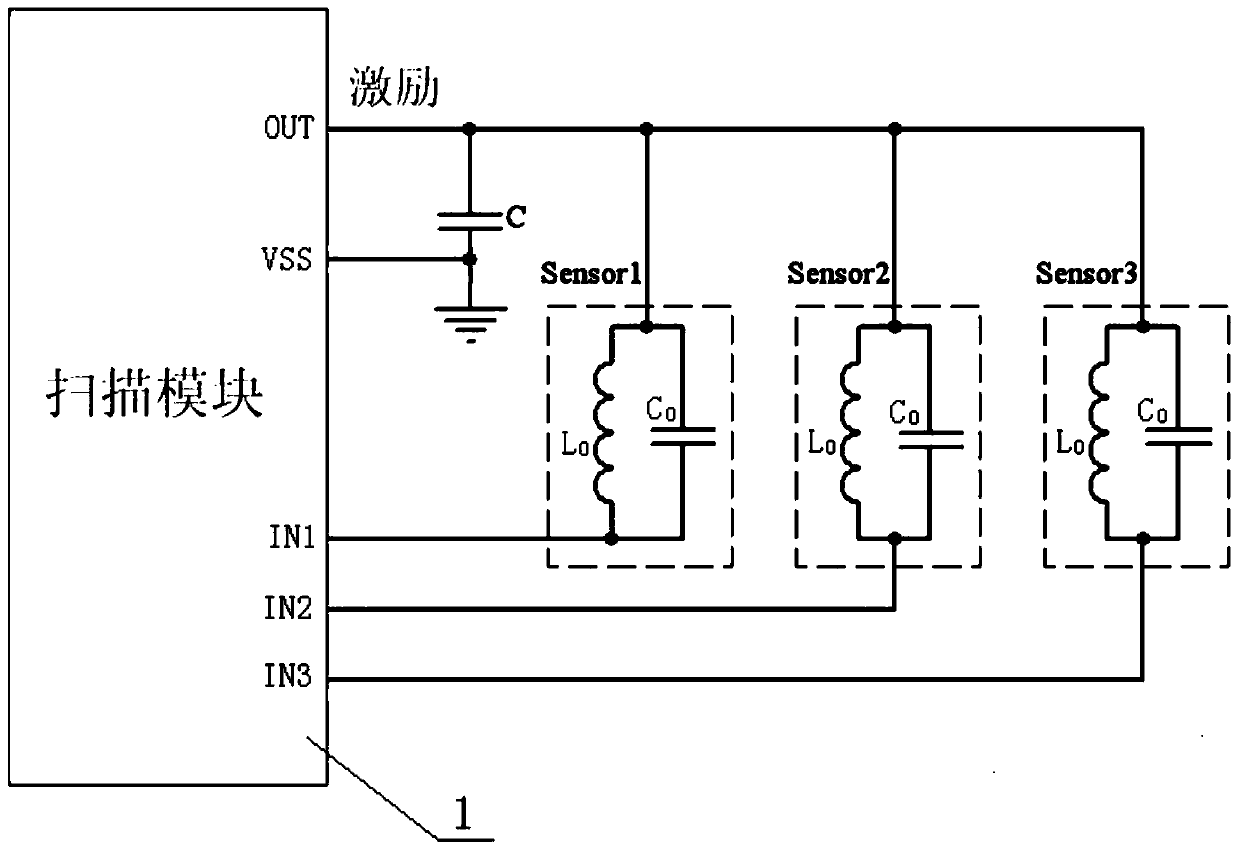
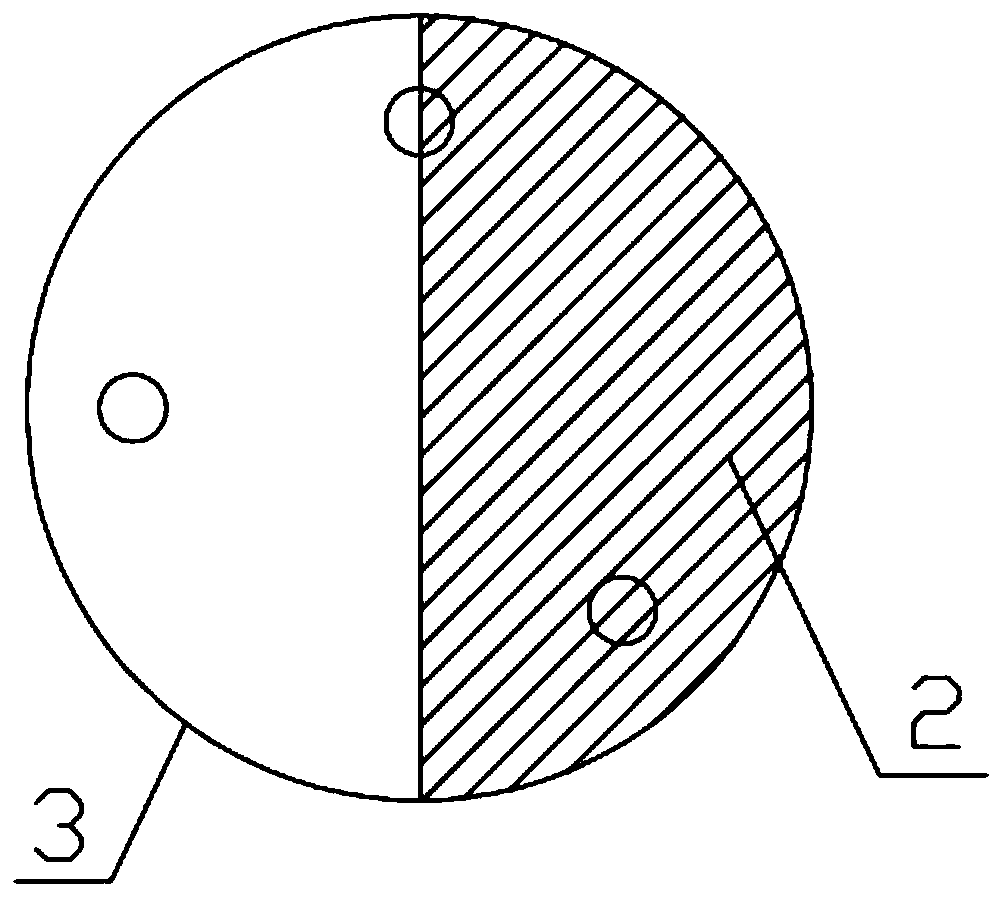
[0031] Embodiment 1: as Figure 7 , Figure 8 The non-magnetic sensor shown includes a scanning module 1, three LC oscillating circuits (namely the first LC oscillating circuit 4, the second LC oscillating circuit 5, and the third LC oscillating circuit 6) and is installed on the upper end of the impeller and on A plastic disc 3 covered with a metal sheet 2 on the surface, the metal sheet 2 is semicircular and covers half of the upper surface of the plastic disc 3 . The first LC oscillator circuit 4 consists of the first capacitor C 1 with the first inductance L 1 Parallel configuration, the resonant angular frequency of the first LC oscillator circuit 4 The second LC oscillator circuit 5 consists of a second capacitor C 2 with the second inductance L 2 Parallel configuration, the resonant angular frequency of the second LC oscillator circuit 5 The third LC oscillating circuit 6 is composed of the third capacitor C 3 with the third inductance L 3 In parallel configur...
Embodiment 2
[0033] Embodiment 2: The structure of the non-magnetic sensor in this embodiment is mostly the same as that of Embodiment 1, the difference is: L 1 ≠ L 2 ≠ L 3 (i.e. the first inductance L 1 , the second inductance L 2 , the third inductance L 3 not equal), C 1 =C 2 =C 3 (i.e. the first capacitor C 1 , the second capacitance C 2 , the third capacitor C 3 equal).
Embodiment 3
[0034] Embodiment 3: The structure of the non-magnetic sensor in this embodiment is mostly the same as that of Embodiment 1, the difference is: L 1 ≠ L 2 ≠ L 3 (i.e. the first inductance L 1 , the second inductance L 2 , the third inductance L 3 not equal), C 1 ≠C 2 ≠C 3 (i.e. the first capacitor C 1 , the second capacitance C 2 , the third capacitor C 3 not equal).
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More