

Auxiliary vehicle driving method based on image binarization processing
A technology of image binarization and vehicle driving direction, applied in instruments, character and pattern recognition, closed-circuit television systems, etc., can solve problems such as image signal interference, vehicle volume and cargo damage, image acquisition system limitations, etc., to achieve noise removal It has the effect of strong and interference ability, improving image processing speed, and reducing the difficulty of image processing.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
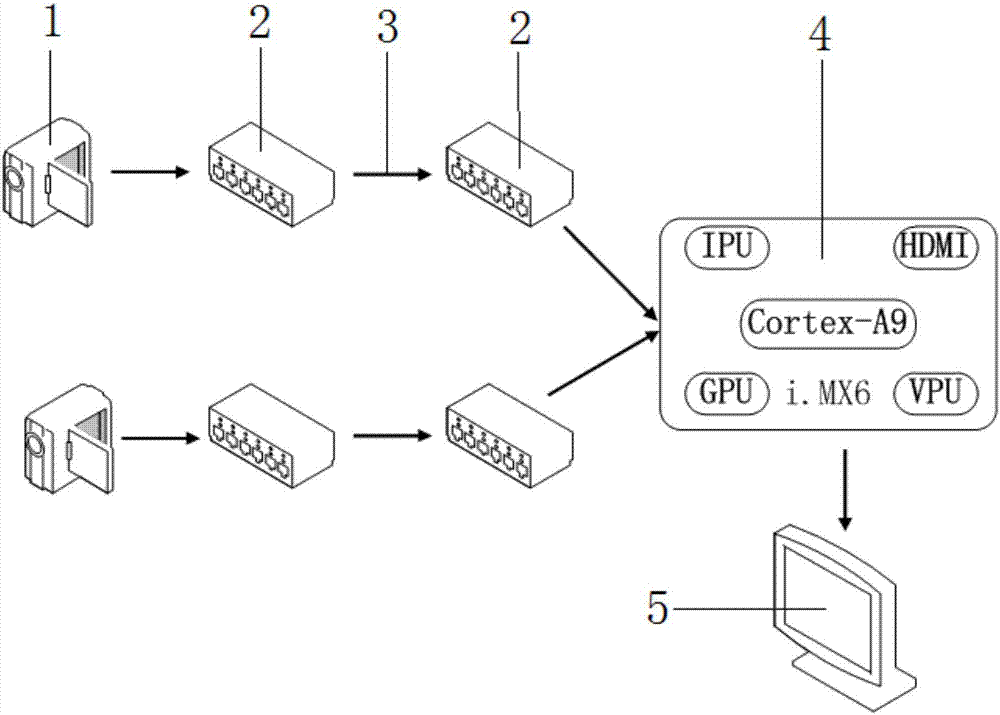
[0018] The auxiliary vehicle driving method based on image binarization processing of the present invention requires a CCD camera 1, an optical fiber converter 2, a transmission fiber 3, an image acquisition card 4 and a host computer 5 to form a hardware system, and the CCD camera 1 is equipped with Infrared CCD camera with infrared light source, this hardware system is installed on a large flat vehicle. The upper computer 5 receiving the signals of two CCD cameras 1 is located in the cab of the vehicle, and the signals output by the CCD cameras 1 are transmitted through the optical fiber through the optical fiber converter. Each CCD camera 1 has a corresponding display device in the vehicle cab.
[0019] Method of the present invention comprises the following steps:
[0020] 1) Install a set of CCD cameras at the front and rear ends of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More