

Pipe robot three-axis differential mechanism
A pipeline robot and differential mechanism technology, applied in the direction of differential transmission, pipe components, special pipes, etc., can solve the problems of decreased effective traction force, low effective driving force, high manufacturing cost, etc., and achieve real-time performance, flexibility, and improved The effect of adaptability and improving the ability to overcome obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings.
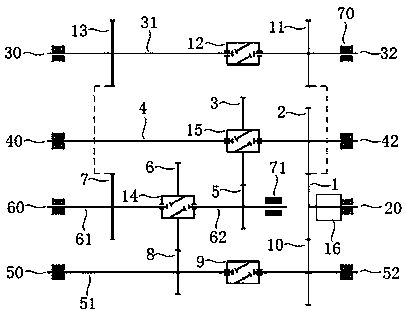
[0028] see figure 1 , the three-axis differential mechanism of the pipeline robot in a specific embodiment of the present invention includes an input shaft 20, one end of the input shaft 20 is fixedly installed with an input shaft gear 1, the other end of the input shaft 20 is rotationally connected with the housing 70, and the input shaft 20 is driven by a motor 16 located between the input shaft gear 1 and the housing 70 and fixedly coupled with the housing 70; it also includes a first rotating shaft 30, a second rotating shaft 40, a third rotating shaft 50, and a main differential shaft 60;
[0029] The first rotating shaft 30 includes a first front differential shaft 31 and a first rear differential shaft 32 , and the first front differential shaft 31 and the first rear differential shaft 32 are coupled through the f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More