

Laser radar based robot mapping navigation system and method
A laser radar and navigation system technology, applied in navigation calculation tools, radio wave measurement systems, instruments, etc., can solve problems such as poor real-time performance, large light conditions, and large image processing capacity, achieving good stability and versatility. Good and reliable results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
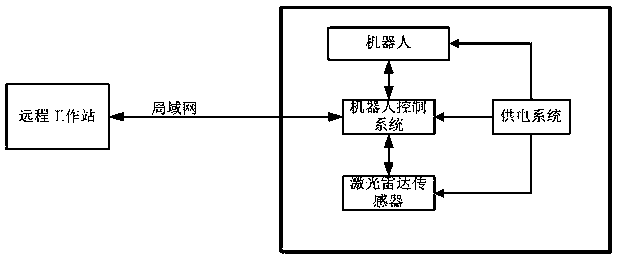
[0052] like figure 1 As shown, a laser radar-based robot mapping navigation system includes:
[0053] Mobile robots with underlying drivers;
[0054] The remote workstation is provided with a graphical user interface, connected to the robot control system through a wireless local area network, and used for remotely sending instructions for moving, scanning, mapping and navigation of the robot;
[0055] The robot control system is used to control the robot to move, scan, map and navigate according to the instructions of the remote workstation;
[0056] A lidar sensor, arranged on the robot, is used to scan the surrounding environment in 360° rotation;
[0057] Power supply system for powering robots, robot control systems, lidar sensors, and remote workstations.
[0058] Specifically, the robot includes a wheeled mobile robot, a multi-legged articulated mobile robot or a crawling robot.
[0059] The robot control system adopts a microcomputer equipped with Ubuntu Linux syst...
Embodiment 2
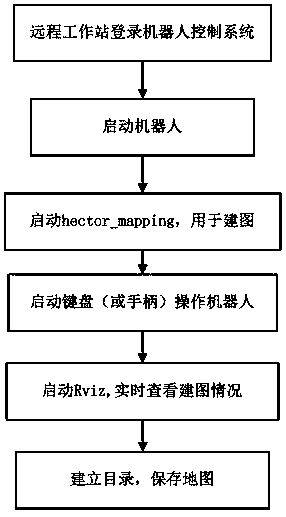
[0064] A method for robot mapping and navigation based on the system, comprising the steps of:
[0065] S1. Establishing a communication connection between the remote workstation and the robot control system based on a local area network;
[0066] S2. Start the power supply system, start the lidar and scan the surrounding environment;
[0067] S3. Control the movement of the robot through the remote workstation;
[0068] S4. The robot control system uses a mapping algorithm to construct a two-dimensional grid map of the environment and saves the constructed map in a remote workstation;
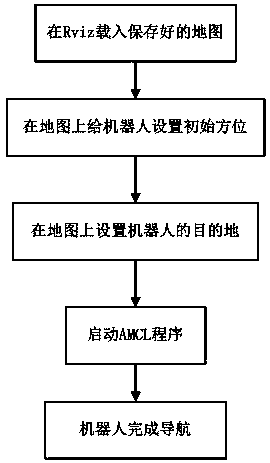
[0069] S5. Based on the constructed map, use the positioning and navigation algorithm to navigate the mobile robot.
[0070] In this embodiment, the steps S1, S2, S3, S4, and S5 are all implemented based on the Robot Operating System (ROS) platform under the Ubuntu Linux system.
[0071] Specifically, the step S1 specifically includes sub-steps:
[0072] S11. Build a router platform and cr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More