

Driving arm of surgical robot
A technology of surgical robot and active arm, which is applied in the field of medical equipment, can solve the problems that the internal transmission belt cannot go in a straight line, the front-end surgical equipment is easy to shake, and the complexity of the structure is increased, so as to achieve the effect of not being easy to interfere, light in weight and easy to drive
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The following are specific embodiments of the present invention and in conjunction with the accompanying drawings, the technical solutions of the present invention are further described, but the present invention is not limited to these embodiments.
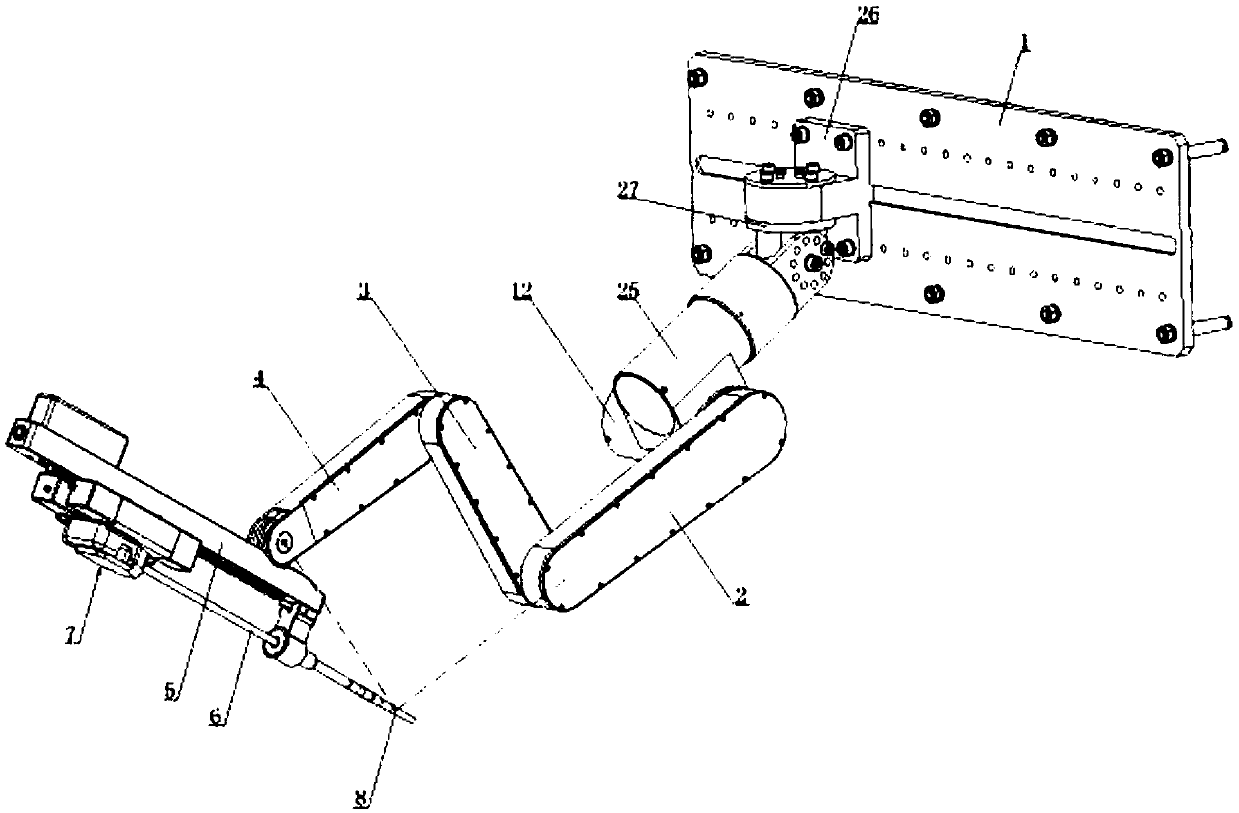
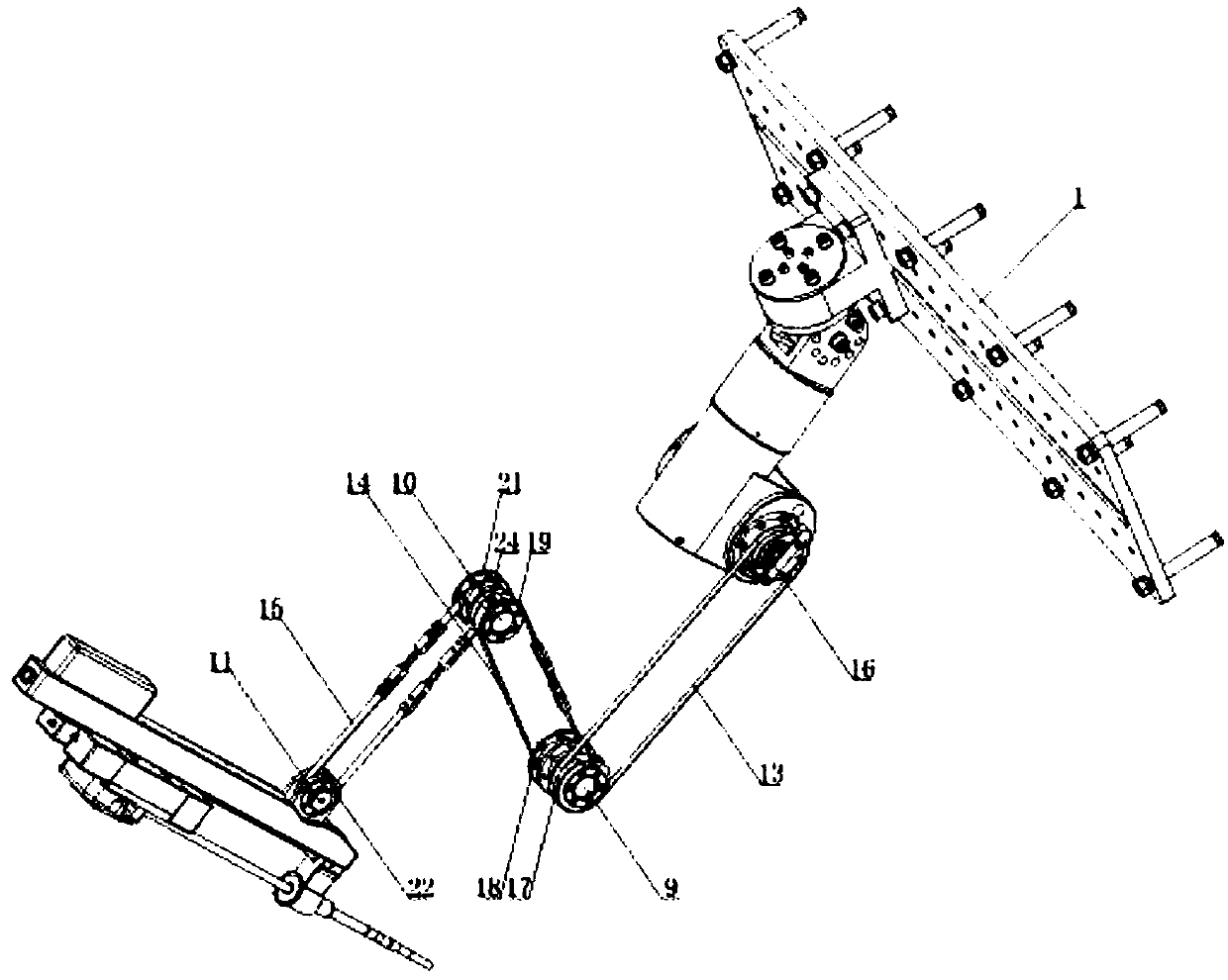
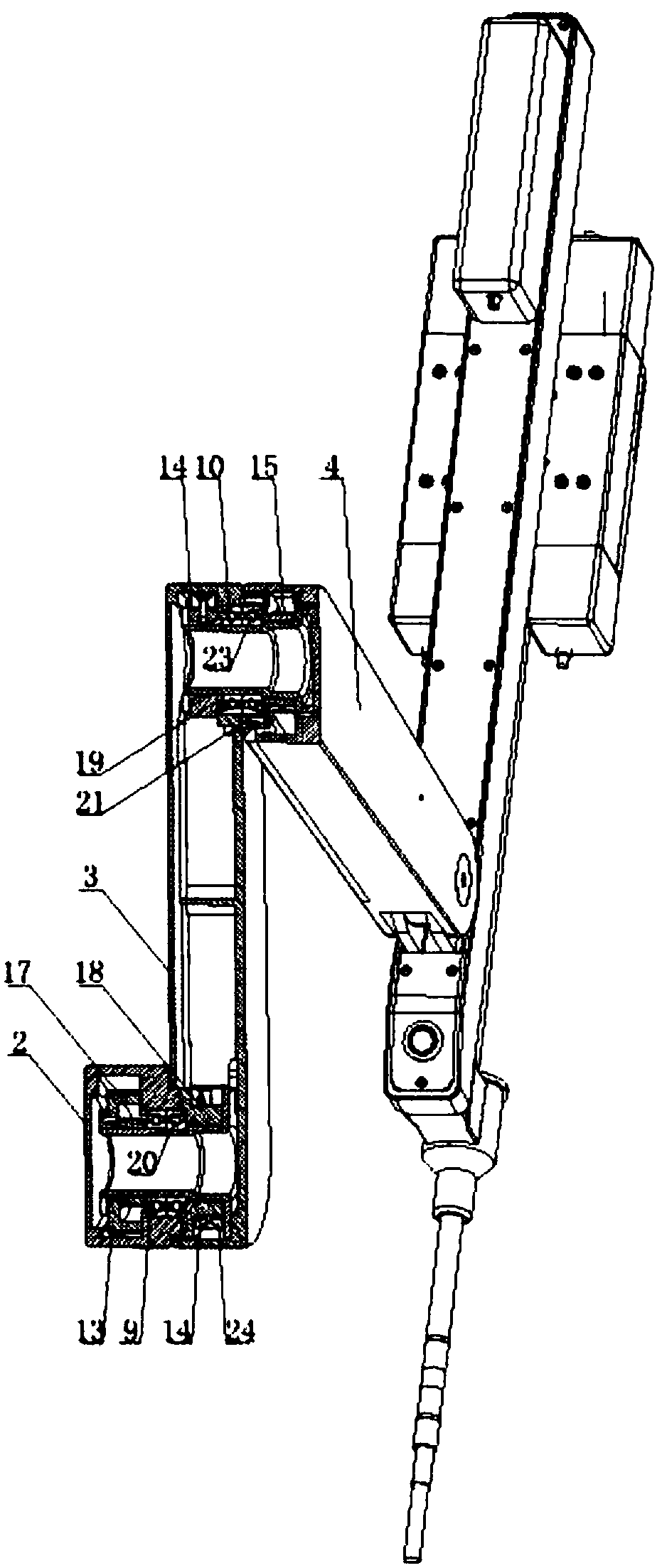
[0029] Such as figure 1 The active arm of the surgical robot shown includes a fixed arm 2 located on the support 1, a middle arm 3 hinged at one end of the fixed arm 2, a front arm 4 hinged at the end of the middle arm 3 away from the fixed arm 2, and a front arm 4 hinged at the front end. The sliding arm 5 at one end of the arm 4 away from the middle section arm 3 is provided with a surgical instrument 7 with an instrument hand 6 on the sliding arm 5 . Such as figure 1 As shown, the middle section arm 3 is located at the side of the fixed arm 2, and the front section arm 4 is located at the side of the middle section arm 3. The middle section arm 3 and the front section arm 4 form two adjacent sides of a parallelogram. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More