

Gain switching non-linear control method for agricultural vehicle path tracking
A nonlinear control, agricultural vehicle technology, applied in the field of gain switching nonlinear control of agricultural vehicle path tracking, can solve problems such as insufficient robustness and stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0066] The present invention will be further described below in conjunction with the accompanying drawings.
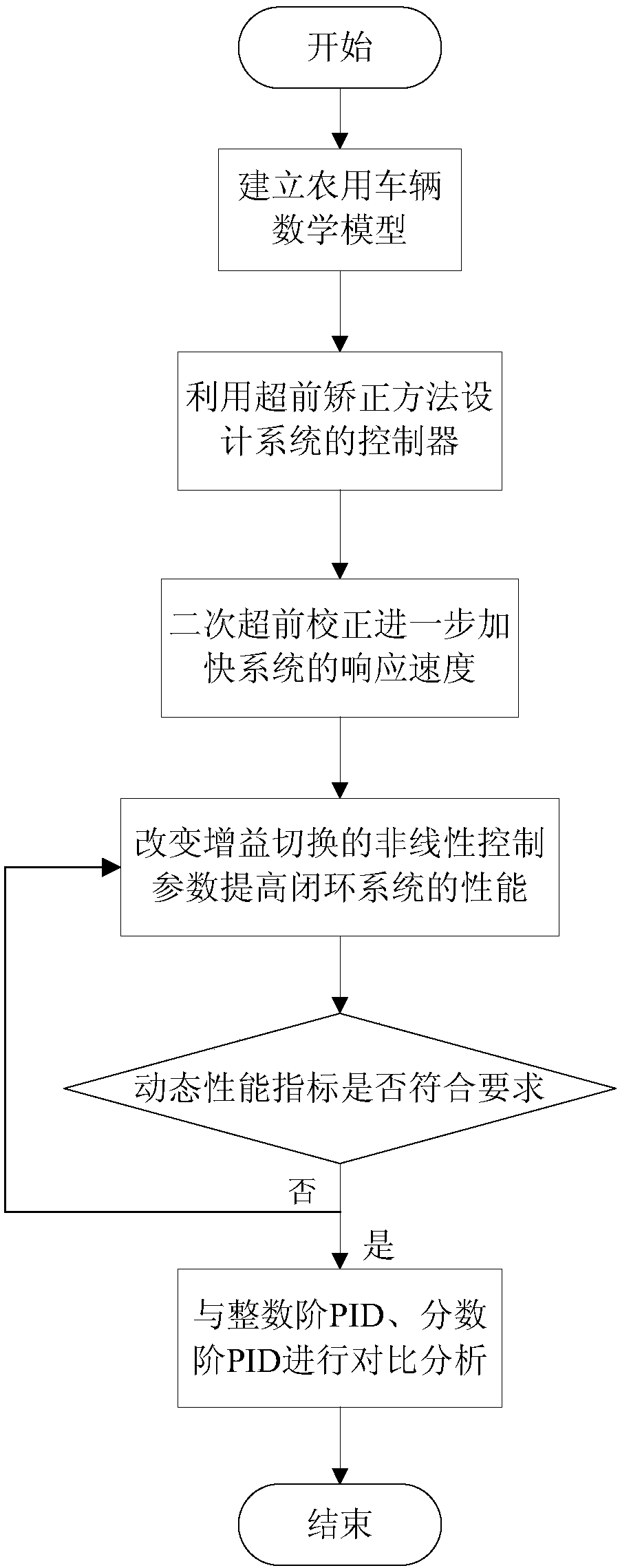
[0067] Such as figure 1 As shown, a gain switching nonlinear control method for path tracking of agricultural vehicles, including the following steps:
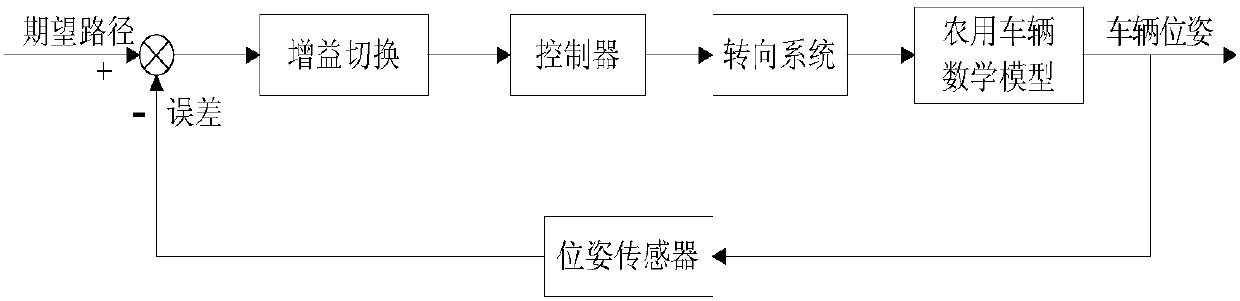
[0068] Step 1: Build a path-following control system for agricultural vehicles. The closed-loop transfer function of the path-following control system for agricultural vehicles is composed of the PID controller C(s) and the system model G(s) of the agricultural vehicles. The system model of the agricultural vehicles is composed of the steering system model G 0 (s) and agricultural vehicle motion model G 1 (s) composition;
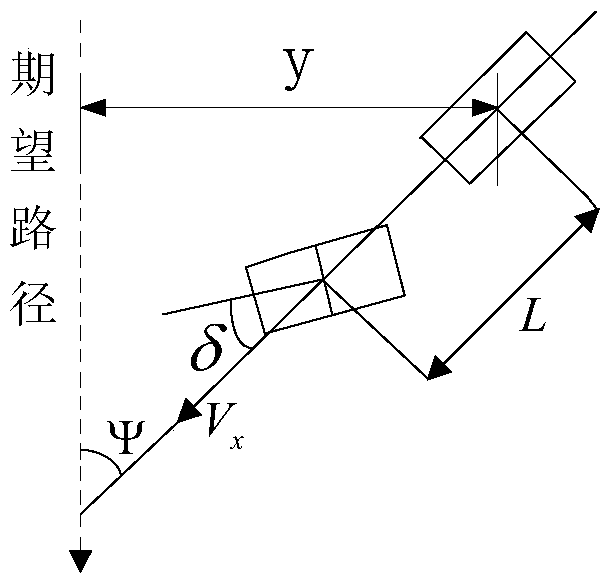
[0069] Step 2: According to the actual demand of the vehicle movement, set the input of the agricultural vehicle path tracking control system as the expected path u, and the output as the actual path tracking effect y, and set the expected output at this time as y=u=1;
[0070] Step 3: Determine ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More