

Space manipulator track rolling planning method based on vision measurement
A space manipulator, visual measurement technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as unstable and continuous motion, and achieve the effect of smooth motion, high flexibility, and strong adaptability of the manipulator.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
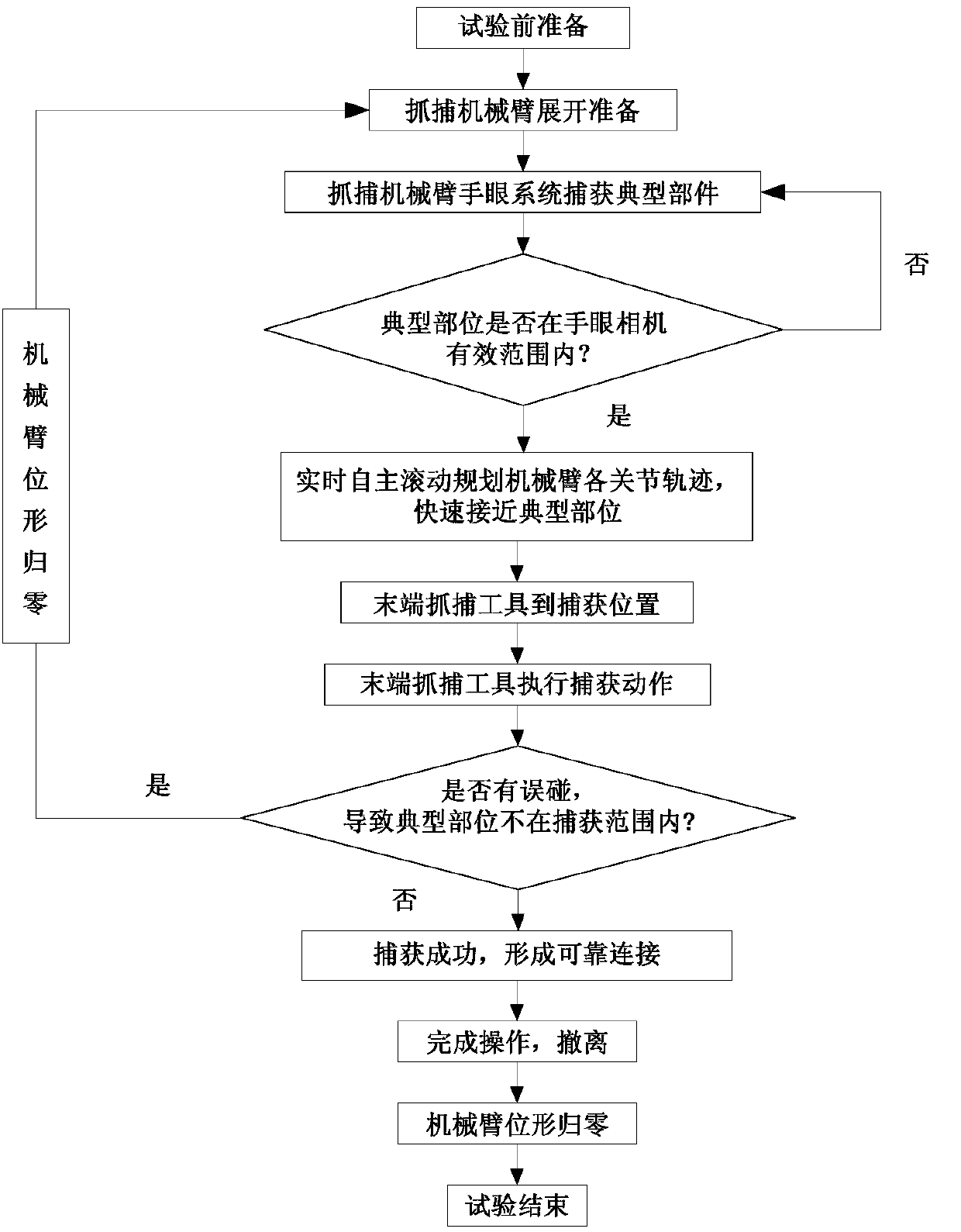
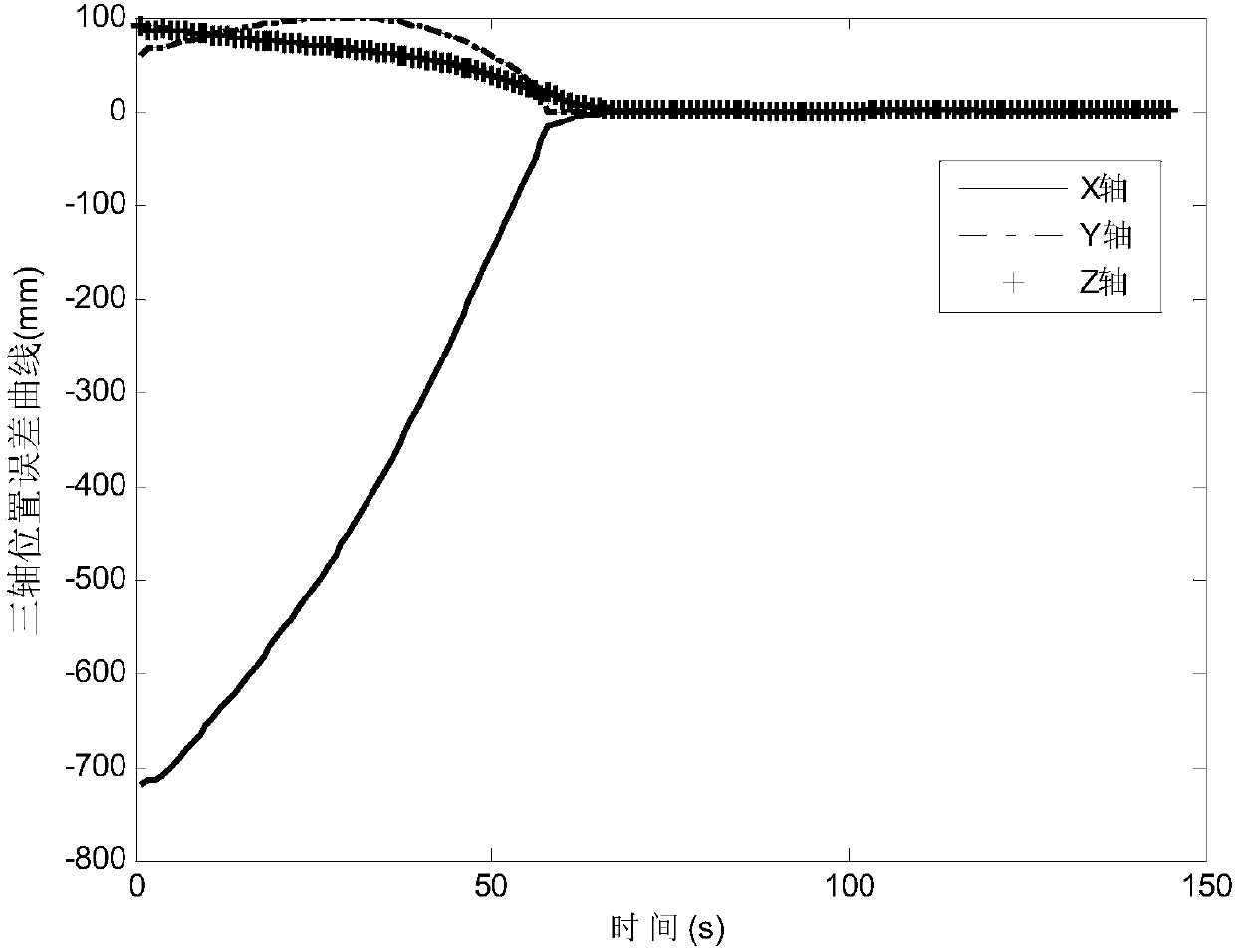
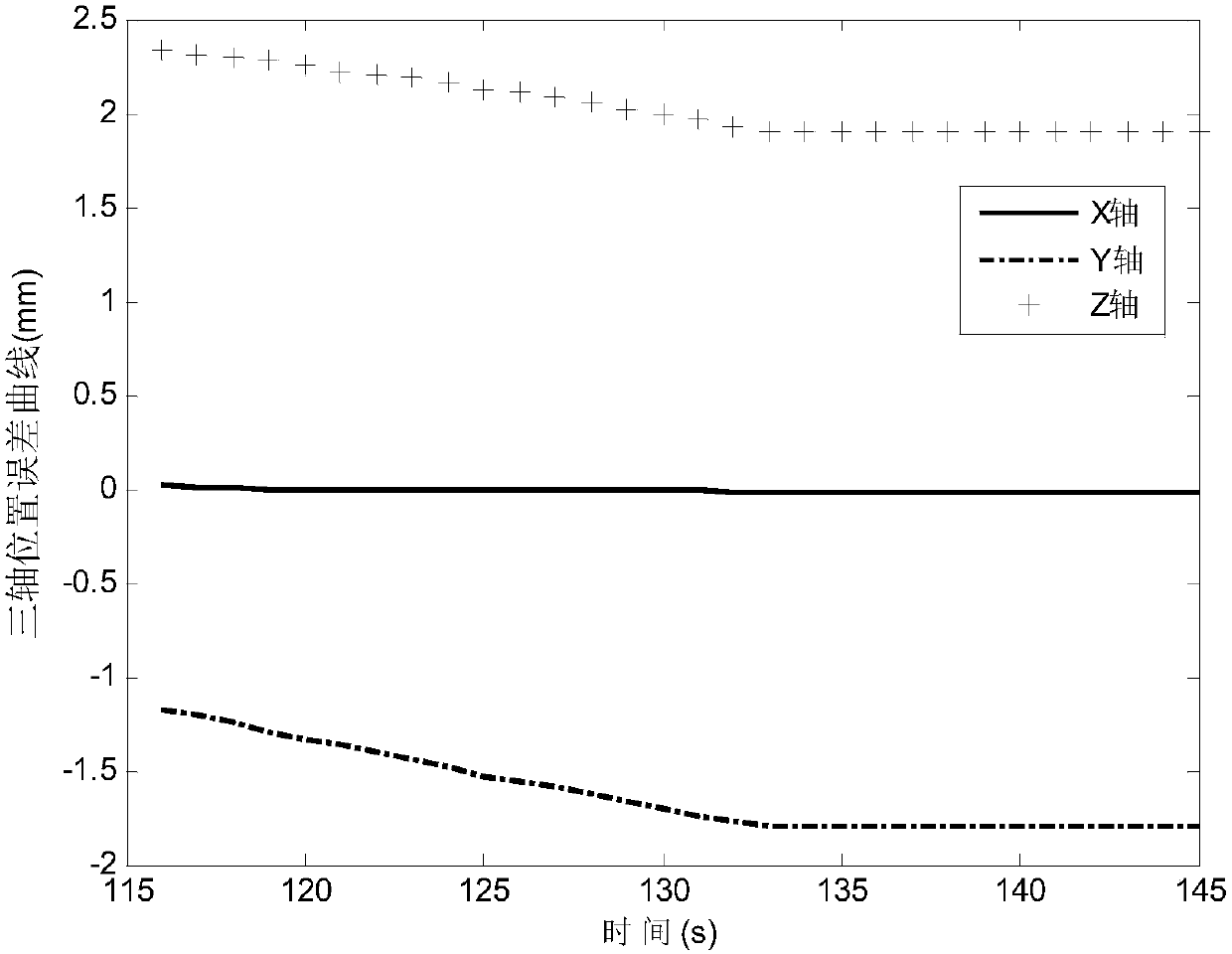
[0039] Based on the ground test system for capturing and operating non-cooperative targets in space, the rolling planning algorithm disclosed in the present invention is verified. The mechanical arm adopts a series structure, and the terminal measurement device is a hand-eye binocular camera. Considering safety, before the manipulator starts to operate, the attitude and orbit control system of its base satellite platform is turned off to become a free-floating space manipulator. When the captureable part of the target star is in the field of view of the visual sensor, and the sensor can measure the relative pose of the captureable part, the space manipulator enters the vision guidance mode. The camera measures the relative expected pose of the captureable parts on the target star in the camera coordinate system, and then performs upper-level planning to obtain the joint position and joint speed of the manipulator at the next sampling time of the hand-eye binocular camera, and t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More