

Intelligent wheelchair control and route optimization method based on visual evoked brain-computer interface
A brain-computer interface and visually evoked technology, applied in vehicle rescue, patient chairs or special vehicles, user/computer interaction input/output, etc. Reduce the execution efficiency of brain-controlled intelligent wheelchairs, and achieve the effects of friendly brain-computer interaction, reduced number of operations, and optimized paths
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
[0037] The intelligent wheelchair control and path optimization method based on visually induced brain-computer interface includes the following steps:
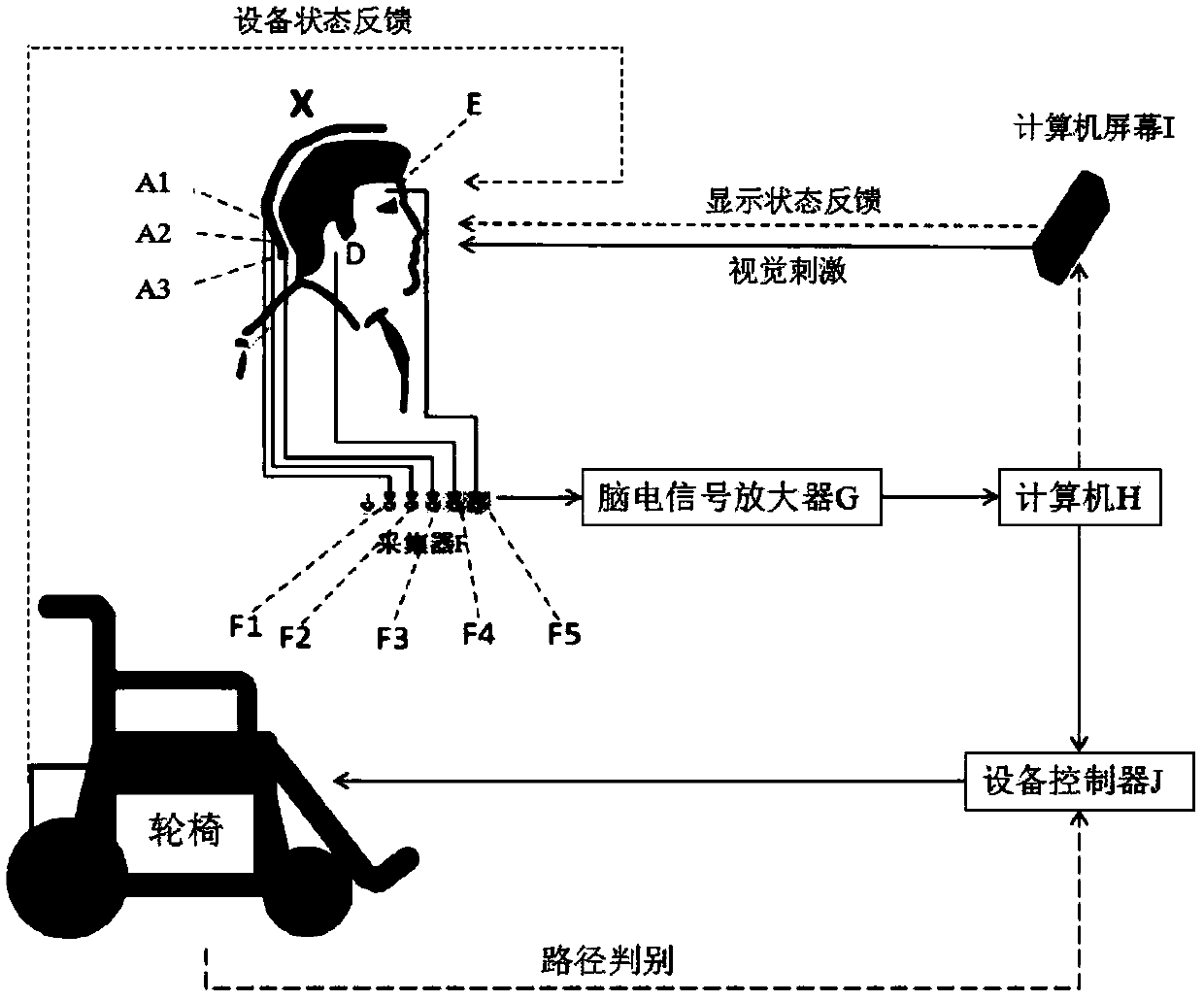
[0038] Step 1, refer to figure 1, the user is sitting in a wheelchair, and the distance between the wheelchair and the computer screen is 80 cm; according to the international 10-20 system electrode placement standard, the measurement electrodes A1, A2 are respectively placed on the occipital areas O1, Oz, and O2 of the user's head X , A3, place the reference electrode D at the position of the earlobe on one side of the user's head X, place the ground electrode E at the position of the forehead Fpz of the user's head X, pour conductive paste into the electrode, and ground the ground electrode to ensure that the electrode impedance remains Less than 5 kohms; the output terminals of the measur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More