Pneumatic soft hand grab
A pneumatic finger and software technology, which is applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of unfavorable industrial popularization, high precision requirements, and damage to grasping objects, and achieve good finger bending effect, convenient and reliable control, and low cost. low effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The purpose of the present invention will be further described in detail through specific examples below, and other examples cannot be repeated here one by one, but the implementation mode of the present invention is not limited to the following examples.
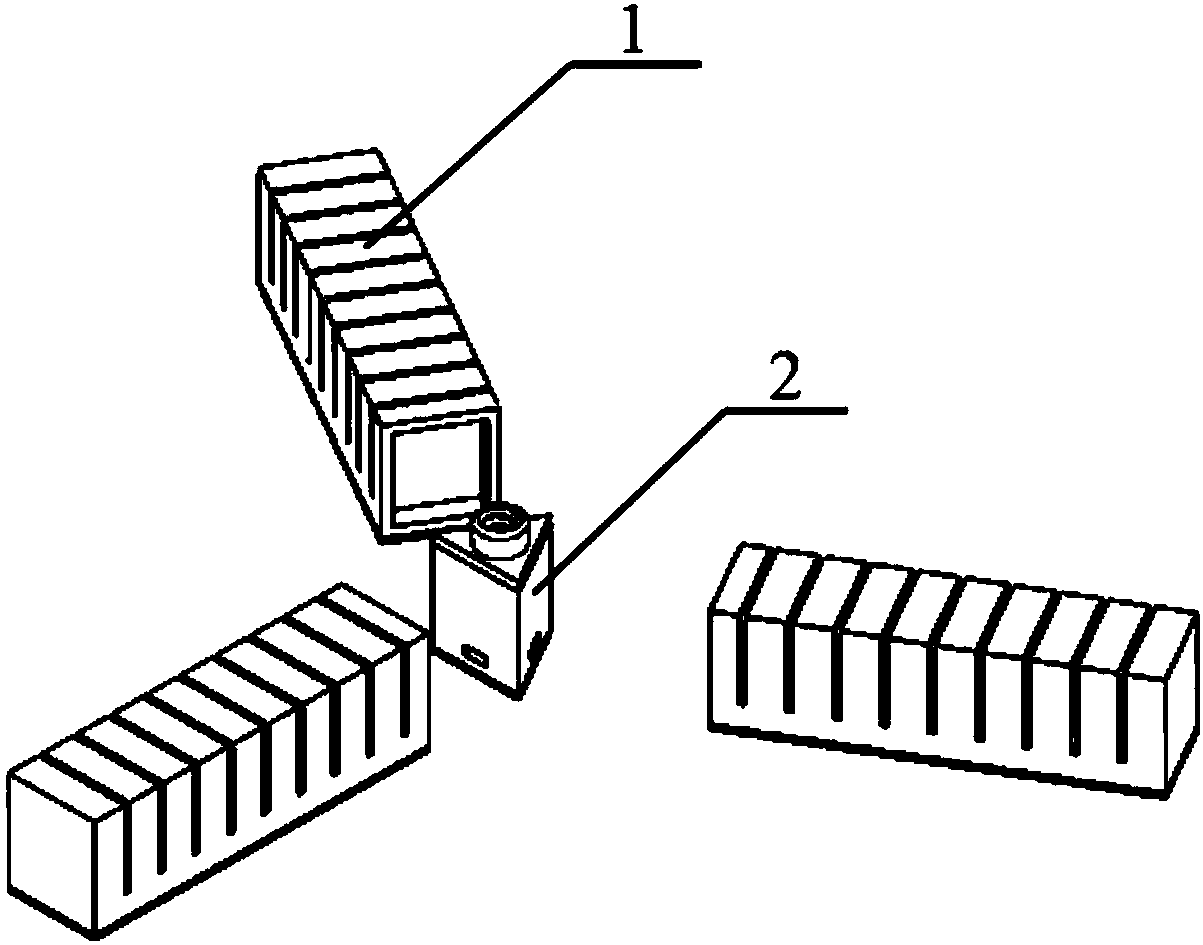
[0029] Such as figure 1 As shown, a pneumatic software gripper includes a central air guide block 2 provided with several air guide holes, three flexible pneumatic finger units 1 evenly connected to the central air guide block 2, and the pneumatic finger unit 1 Hard rubber layer 4 is provided on the inner concave surface when inflated and deformed.
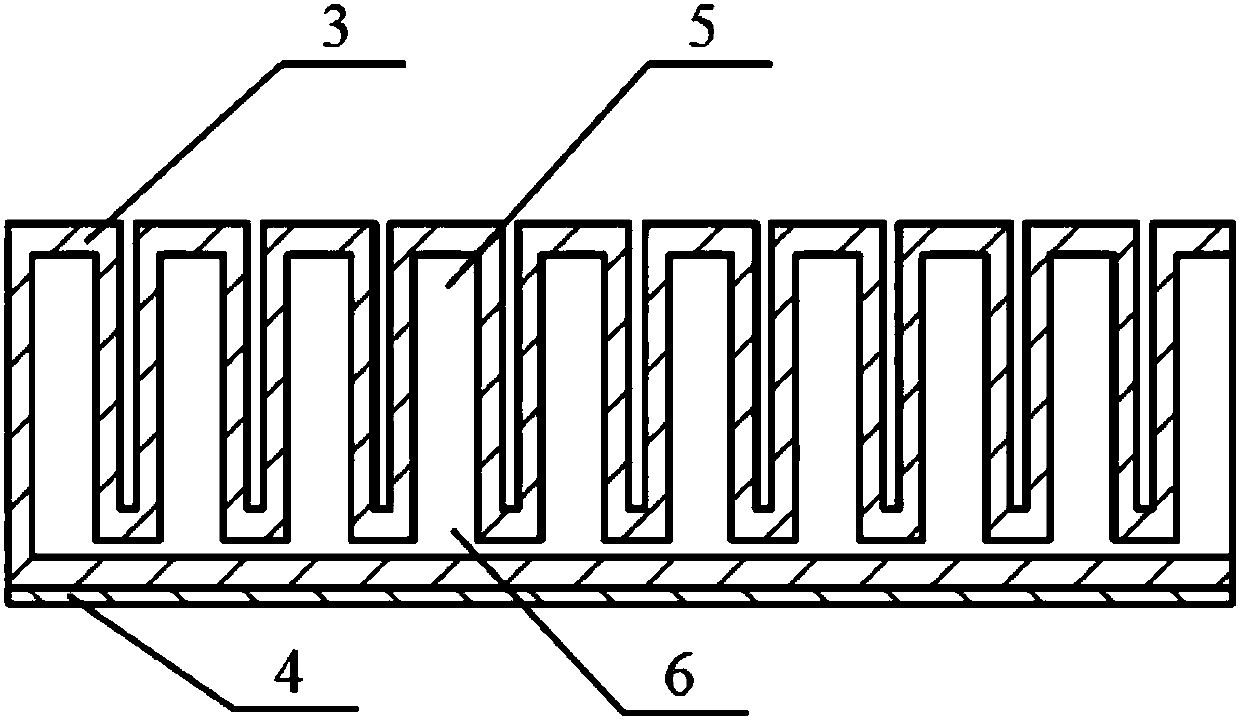
[0030] Such as figure 2 As shown, the pneumatic finger unit 1 includes a rubber shell 3, in which a number of deformation air chambers 5 are evenly spaced along the length direction, and the lower end of each deformation air chamber 5 passes through an air guide chamber 6 sealed at one end. It communicates with the air guide hole corresponding to the central air guide...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com