

Adaptive two-dimensional force feedback wrist connector and sensor for light-duty robotic arm
A robotic arm and self-adaptive technology, applied in manipulators, instruments, force/torque/power measuring instruments, etc., can solve the problems of insufficient measurement sensitivity, low precision, and limited application of force sensors, and achieve flexible and changeable structural design. The effect of improving assembly reliability and improving force feedback accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] Below in conjunction with accompanying drawing and specific real-time example the present invention is described in further detail:
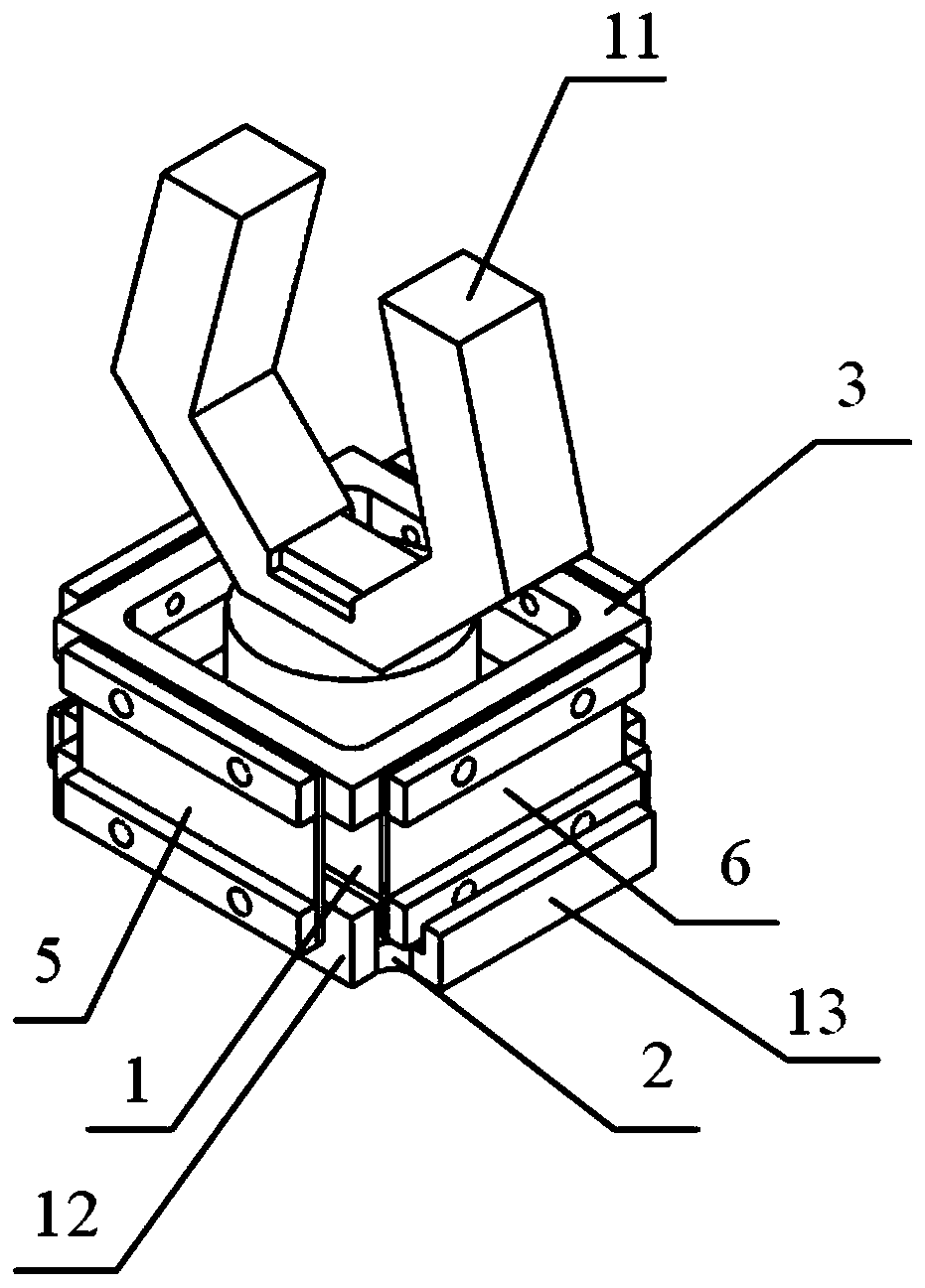
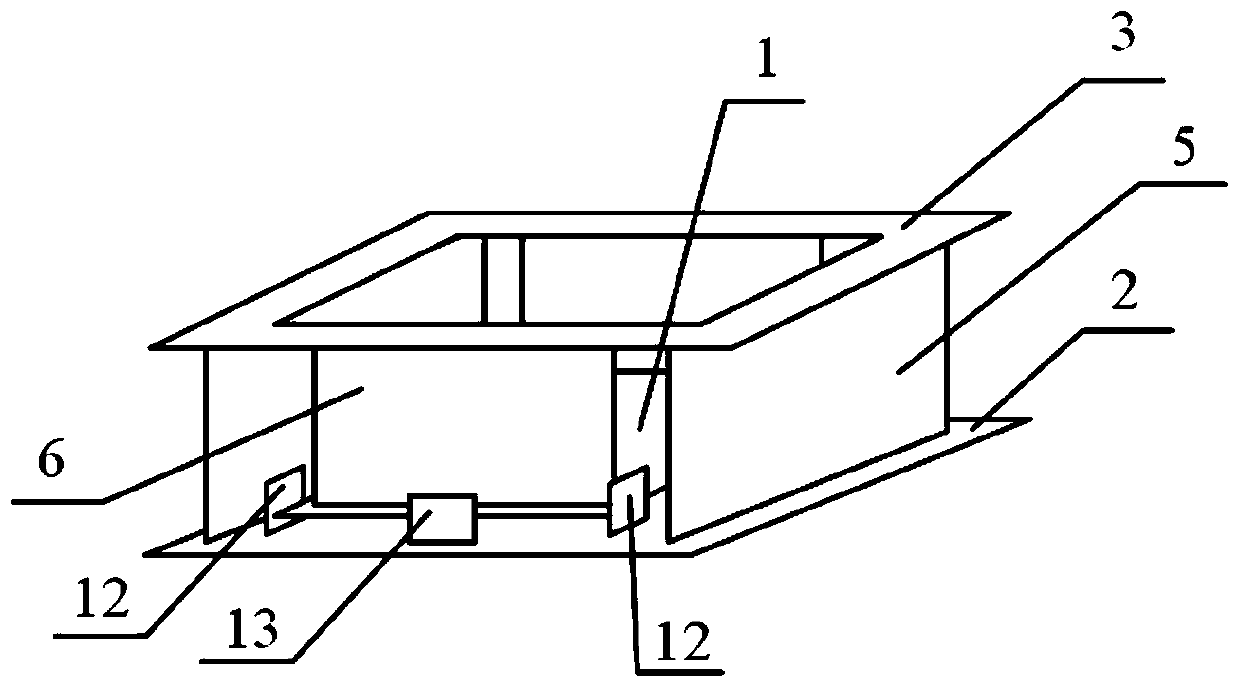
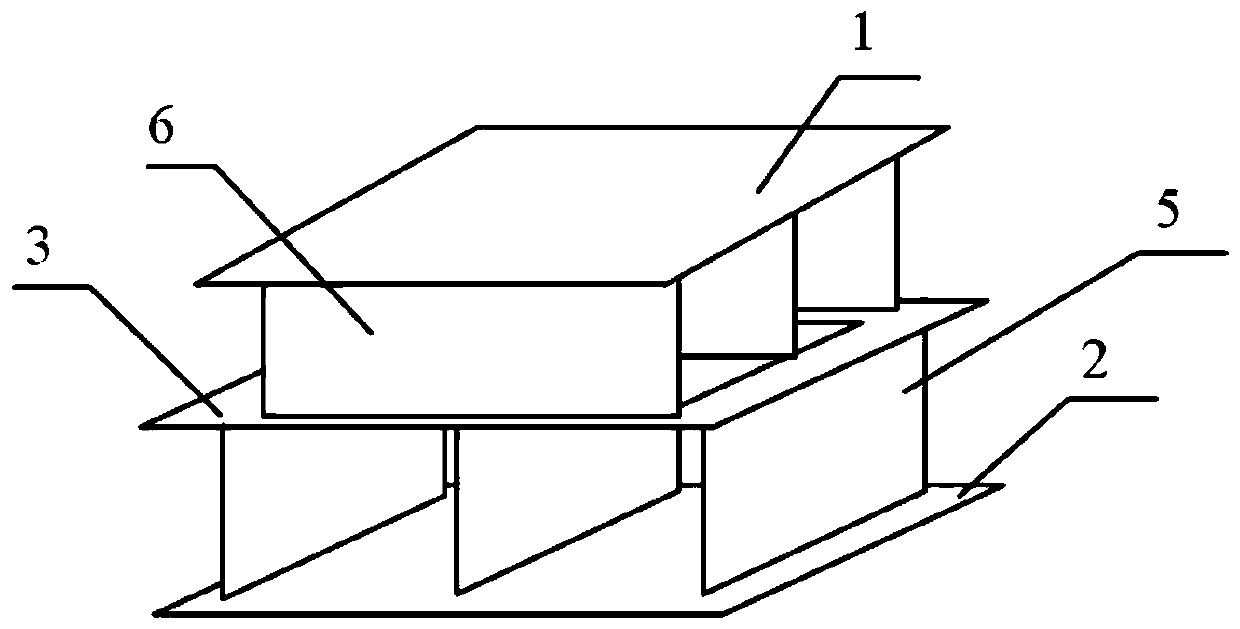
[0036] Such as figure 1 Shown is a schematic diagram of the connection between the two-dimensional force feedback wrist connector of the present invention and the end effector. The two-dimensional force feedback wrist connector of the present invention can be installed between the mechanical arm and the end effector as a robot wrist connector, and Has a certain ability of self-adaptation. The two-dimensional force feedback wrist connector includes a moving plate 1, a fixed plate 2, a middle frame 3, a first leaf spring assembly and a second leaf spring assembly, where the fixed plate 2 is connected to the mechanical arm, and the moving plate 1 is connected to the end effector 11 connect.
[0037] The first spring piece assembly includes n first spring pieces 5, n first spring pieces 5 are arranged in parallel, fixedly connected between ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More